参考链接:https://blog.csdn.net/weixin_43159148/article/details/83375218
dancer-docs
1、设置sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2、设置key(公钥已更新)
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
在这里插入图片描述

3、更新package
sudo apt-get update
4、安装ROS kinetic完整版
sudo apt-get install ros-kinetic-desktop-full
若是Ubuntu18.04则为,
sudo apt-get install ros-melodic-desktop-full
5、初始化rosdep
注意:在使用ROS之前需要初始化rosdep
sudo rosdep initrosdep update
6、配置ROS环境
# if you use bash, replace .zshrc with .bashrcecho 'source /opt/ros/kinetic/setup.zsh' >> ~/.zshrcecho 'export PYTHONPATH=${PYTHONPATH}:/usr/lib/python2.7/dist-packages' >> ~/.zshrcsource ~/.zshrc
7、安装依赖项
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
8、测试ROS是否安装成功
1)CTRL+ALT+T打开终端(Termial),输入以下命令,初始化ROS环境:
roscore
成功打开如下图所示:
上面显示有ROS的版本,还有一些节点、端号等内容。
2)打开一个新的终端(Termial),输入以下命令,弹出一个小乌龟窗口:
rosrun turtlesim turtlesim_node
3)出现一个小乌龟的LOGO后,再 打开一个新的终端(Termial),输入以下命令
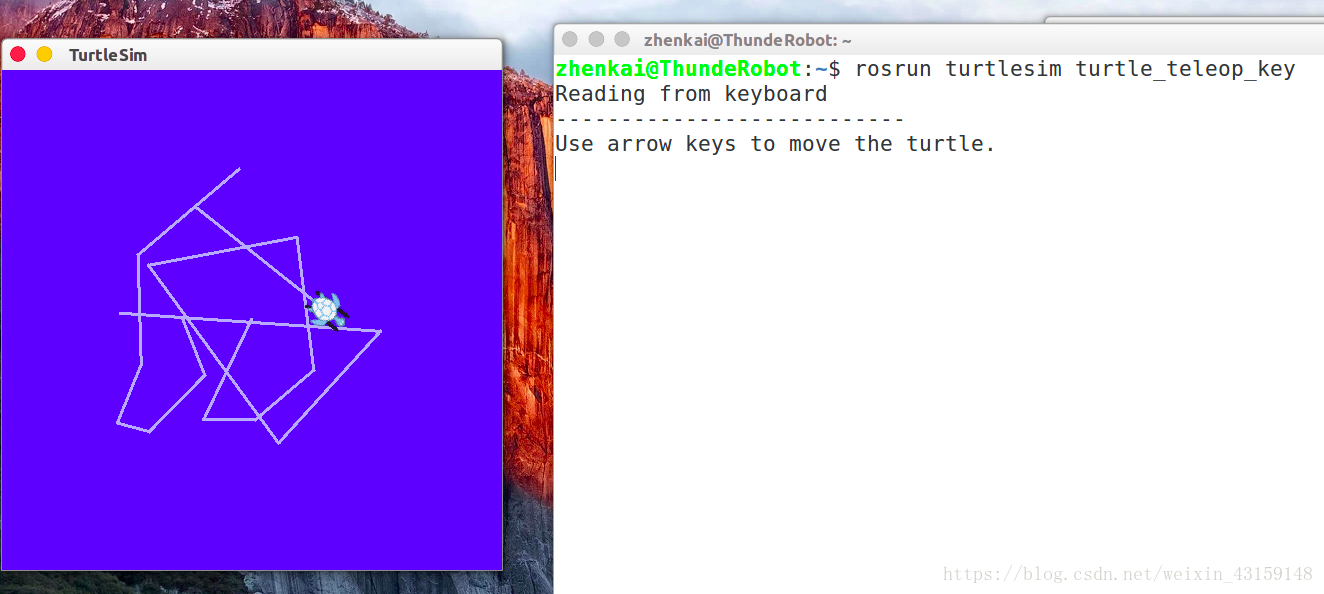
rosrun turtlesim turtle_teleop_key
然后,通过方向键控制小乌龟的移动:如下图所示
4)打开新的Termial,输入以下命令,可以查看ROS节点信息:
rosrun rqt_graph rqt_graph
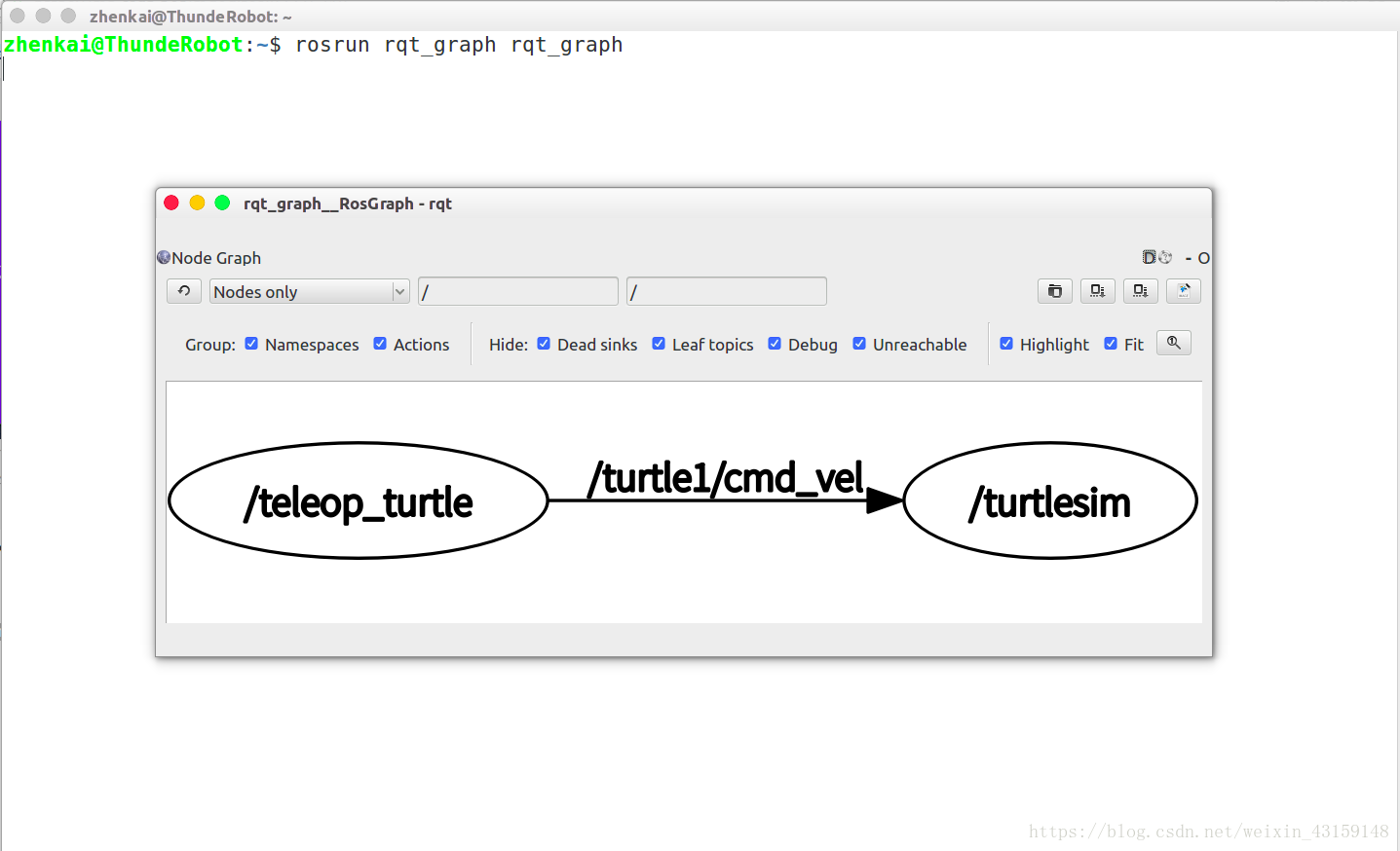
在这里插入图片描述
如果你能顺利进行到这一步,说明ROS安装成功了。
9、问题
rosdep update超时
https://zhuanlan.zhihu.com/p/392082731
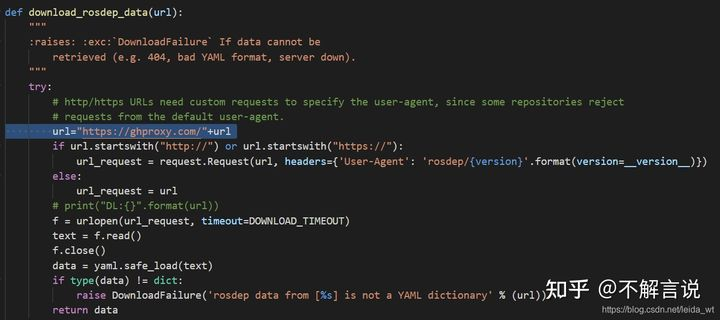
1.打开包含资源下载函数的文件:
$ sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py
- 添加代理:
url=”https://ghproxy.com/"+url
下面是代码修改的位置
- 修改/usr/lib/python2.7/dist-packages/rosdistro/init.py文件中的DEFAULT_INDEX_URL
$ sudo gedit /usr/lib/python2.7/dist-packages/rosdistro/init.py DEFAULT_INDEX_URL = ‘https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml‘
- 修改其余(4个)文件中的地址,在地址 https://raw.githubusercontent.com/… 前添加https://ghproxy.com/
$ sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py //修改第36行的地址 $ sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py 72行 //修改第72行 $ sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/rep3.py //修改第39行 $ sudo gedit /usr/lib/python2.7/dist-packages/rosdistro/manifest_provider/github.py //修改第68行、119行
- 解决 Hit 第五个地址的报错
$ sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py //在第204行添加如下代码(即在该函数块下的第一行处) gbpdistro_url
= “https://ghproxy.com/“ + gbpdistro_url //注意,原网址中代理地址的双引号是中文,直接粘贴复制会报字符识别错误
- 再次运行 rosdep update ,发现问题完美解决!

若有收获,就点个赞吧
0 人点赞
