9.1 信号
信号是一个32位整型数值,代表一个简单信息。每个信号都有一个以SIG开头的名字,实际就是系统定义的宏。
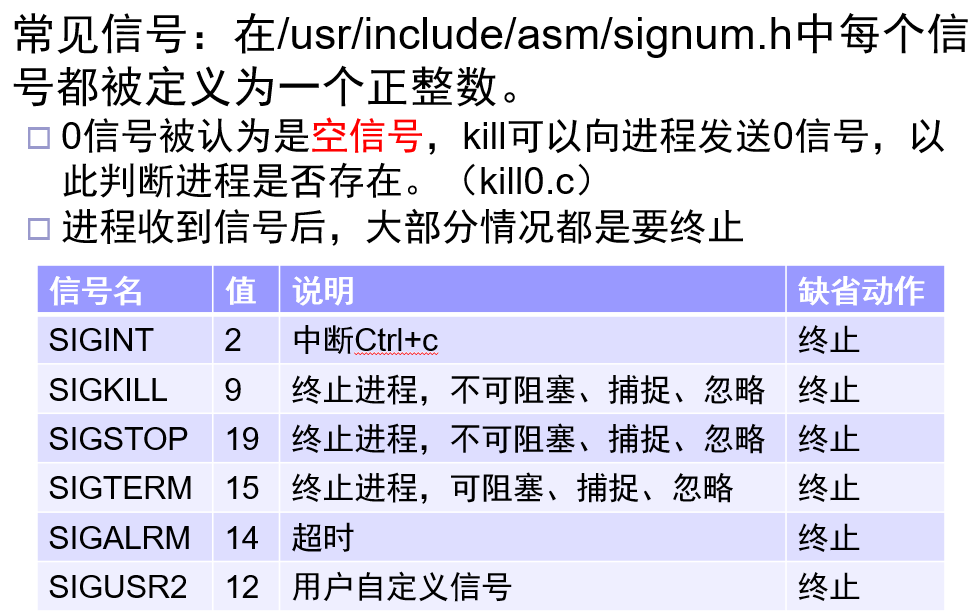
kill -l命令查看当前系统支持的所有信号。最小的信号值为1。
其中值为9的SIGKILL和值为19的SIGSTOP不可以被阻塞。

注意,只有具有root权限的进程才能向其他任一进程发送信号,非root权限的进程只能向属于同一个组或同一个用户的进程发送信号。
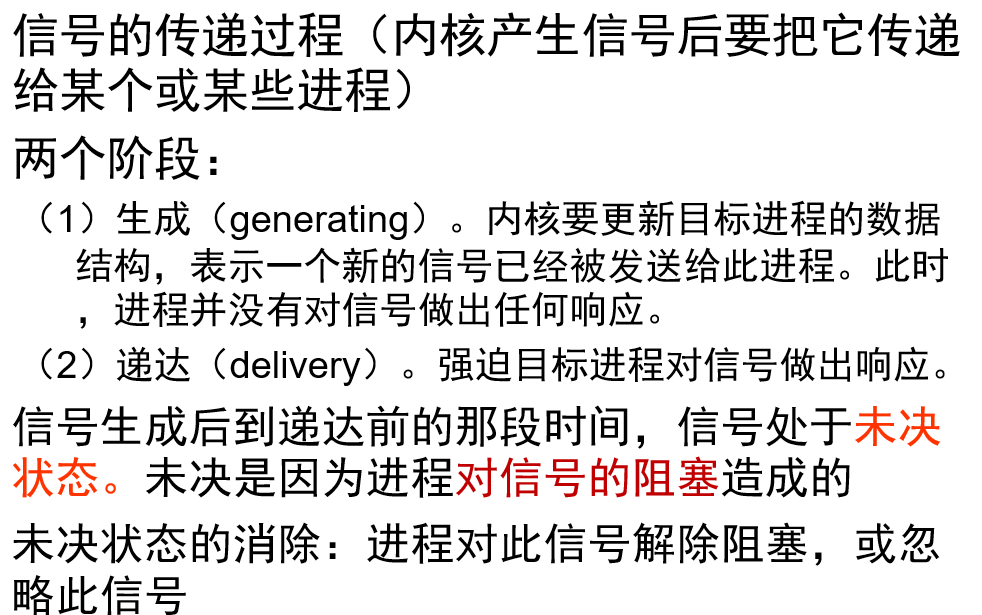
信号是可以被阻塞的。如果为进程产生一个信号,这个信号已经被进程设置为阻塞,并且对该信号的动作为系统默认动作或捕捉该信号,则该信号将一直处于未决(pending)状态。
当进程接收到信号后,信号会做什么?这要视情况而定,很多信号都会杀死进程,某时刻进程还在运行,下一秒就消亡了,从内存中被删除,相应的所有的文件描述符被关闭,并从进程表中被删除。但进程也有方法保护自己不被杀死。
9.1.1 signal系统调用
#include <stdio.h>#include <unistd.h>#include <sys/types.h>#include <signal.h>void sig_handler(int sig){switch(sig){case SIGINT:printf("signal SIGINT is caught\n");break;default:printf("other signal is caught\n");}}int main(){int second = 0;signal(SIGINT,SIG_DFL);signal(SIGINT,sig_handler);//两个signal函数放在一起,以后面一个为准return 0;}
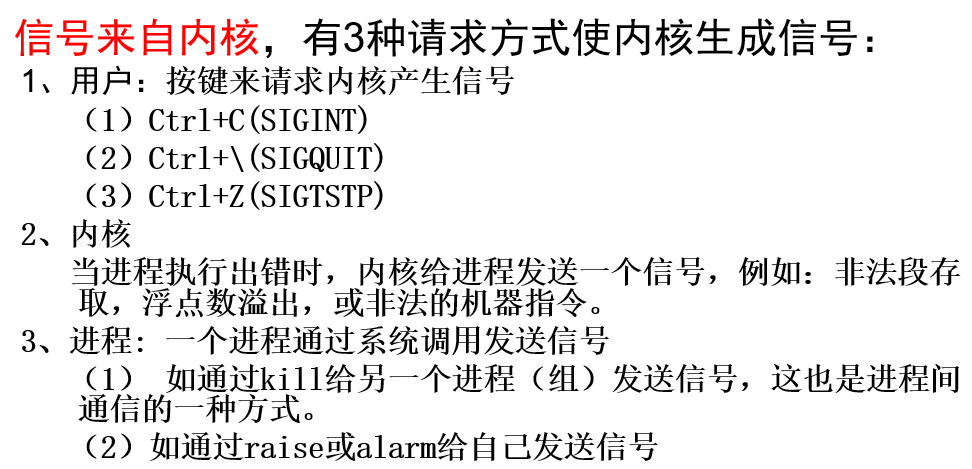
9.1.2 产生信号的两个函数:raise和write
9.1.3 设置定时器——alarm
9.1.4 挂起进程

进程调用pause会挂起,直到进程捕捉到一个信号。当执行完信号处理函数并返回时,pause才返回。pause始终返回1。
9.1.5 异常终止进程
#include <stdio.h>#include <stdlib.h>#include <sys/types.h>#include <signal.h>void sig_handler(int sig){switch(sig){case SIGABRT:printf("signal SIGABRT is caught\n");break;default:printf("other signal is caught\n");}}int main(){signal(SIGABRT,sig_handler);abort();printf("after abort()\n");return 0;}
在该程序中,abort使得内核向进程传递信号SIGABRT,因此,进程执行信号处理函数。由于abort使得程序异常退出,因此程序不会执行abort后面的语句。
9.1.6 添加延时:sleep
sleep的参数为无符号整型值,表示要挂起的秒数。进程调用sleep函数后挂起直到以下两种情况发生:
- 经过了seconds指定的秒数,此时sleep返回;
- 捕捉到一个信号并从信号处理函数返回,此时sleep返回剩余的秒数。
#include <stdio.h>#include <stdlib.h>#include <unistd.h>#include <sys/types.h>#include <signal.h>void sig_handler(int sig){switch(sig){case SIGQUIT:printf("SIGQUIT is caught\n");break;default:printf("other signal is caught\n");}}int main(){int rtn;if(signal(SIGQUIT,sig_handler) != SIG_ERR){printf("please enter Ctrl-\\\n");rtn = sleep(1000);printf("sleep returns and %d seconds remain\n",rtn);rtn = sleep(3);printf("sleep finishes and returns %d seconds\n",rtn);}return 0;}
9.2 管道
管道是双向半双工的,即通过管道可以实现两个方向的数据流,但通信时只有一个方向的数据流。
使用管道进行通信的两个进程一定要有相同的祖先进程。(无名管道)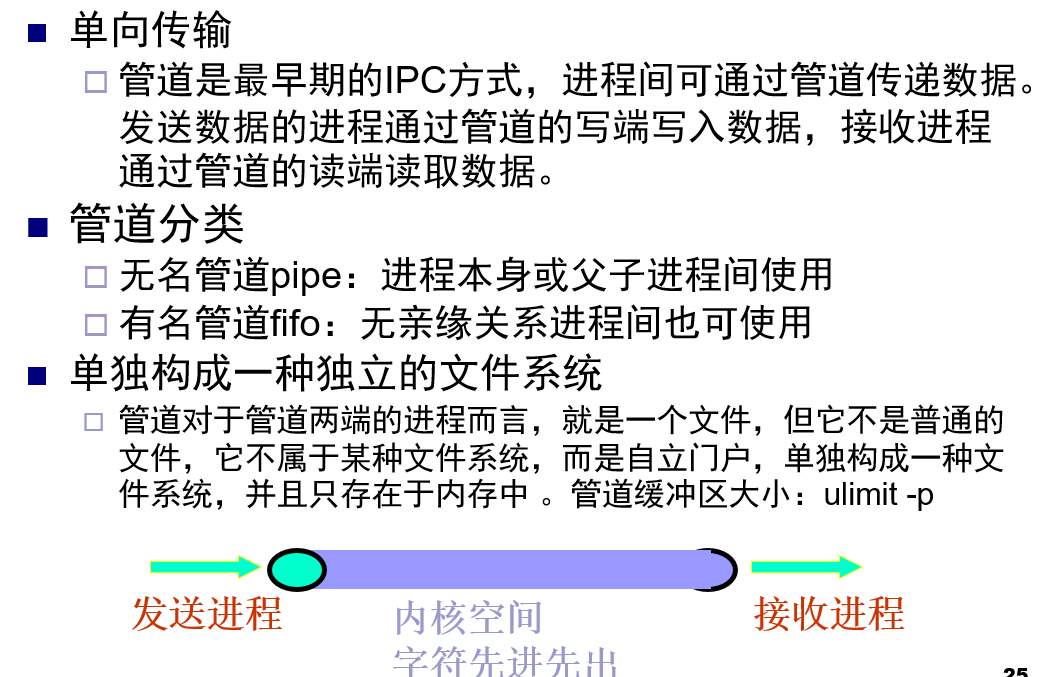

系统调用pipe接收一个具有两个元素的整型数组fds作为参数,pipe成功后返回0,并向fds返回两个文件描述符。fds[0]对应管道读出端,fds[1]对应管道写入端。每个管道都有一个管道缓冲区,大小为4096个字节。可在命令行输入“ulimit -p”查看系统当前管道缓冲区大小,以512字节为单位。(16个缓冲区)
int pipe(int fds[2]);
管道也是文件,是内存文件,没有inode节点,不会存放在磁盘中。
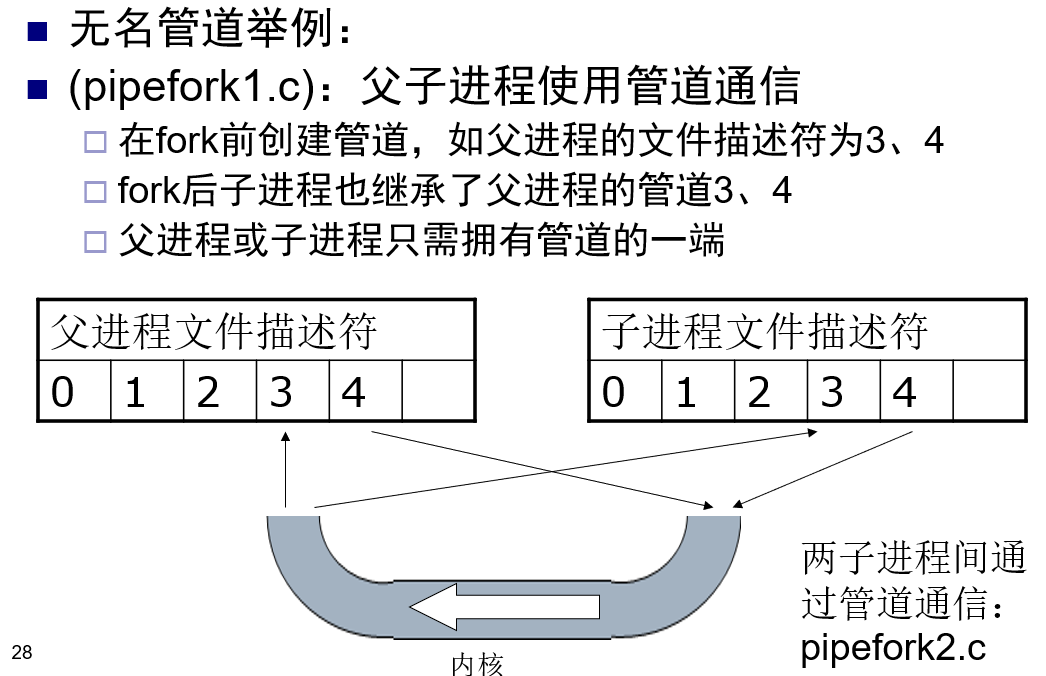
使用管道进行通信的父子进程:
- 父进程调用pipe创建管道,并返回两个文件描述符fds[0]和fds[1]
- 调用fork创建子进程,子进程继承fds[0]和fds[1]
如果子进程向父进程传输数据,则子进程关闭fds[0],父进程关闭fds[1];如果父进程向子进程传输数据,则子进程关闭fds[1],父进程关闭fds[0]
//pipe的典型用法1#include <stdio.h>#include <stdlib.h>#include <unistd.h>#include <sys/types.h>#include <sys/stat.h>#include <fcntl.h>#include <string.h>int main(){pid_t pid;char data[32] = "hello";char buf[32] = {0};int fds[2];if(pipe(fds) == 0){pid = fork();if(pid == 0){close(fds[0]);write(fds[1],data,strlen(data));exit(0);}else if(pid > 0){wait(NULL);close(fds[1]);read(fds[0],buf,sizeof(buf));printf("%s\n",buf);}}return 0;}
//pipe的典型用法2。#include<stdio.h>#include<stdlib.h>#include<unistd.h>#include<sys/types.h>int main(){int fds[2];int pid1,pid2;int sibling,self;if(pipe(fds) == 0){if((pid1 = fork()) == 0){close(fds[0]);self = getpid();write(fds[1],&self,sizeof(int));exit(1);}if((pid2 = fork()) == 0){close(fds[1]);read(fds[0],&sibling,sizeof(int));printf("sibling pid = %d\n",sibling);exit(2);}}return 0;}
pipefork2中父进程创建了两个子进程,第一个子进程把自己的pid写入管道,第二个子进程从管道中读出第一个子进程的pid。<br />因为一个管道的缓冲区容量有限,所以,写进程向已满的管道写数据时,写进程将被阻塞,直至读进程把数据从管道中读出。与之类似,若读进程从空管道中读数据,则读进程也会被阻塞,直至写进程向管道中写数据。如果管道的读出端进程不存在,则写进程调用write时,内核向此进程发送信号SIGPIPE,系统默认动作为终止进程。<br />当fork创建子进程,子进程会继承父进程的文件描述符等。通过struct file就能找到文件缓冲区。<br />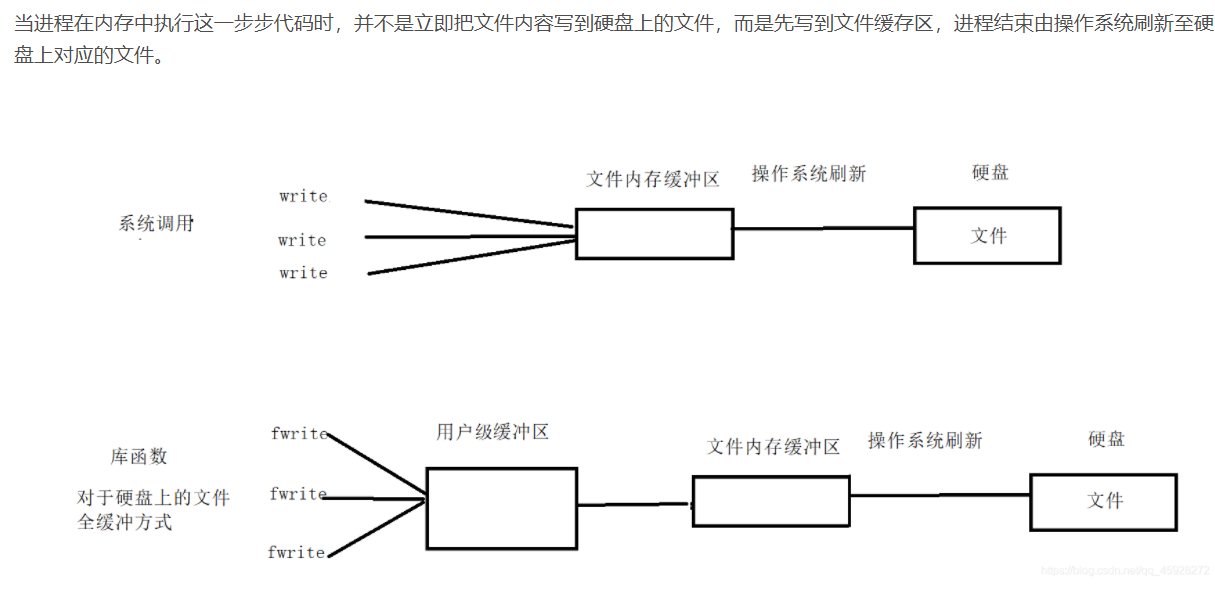<br />

若有收获,就点个赞吧
0 人点赞
