Value-Based Reinforcement Learning
Action-Value Functions

公式  中的
中的  都是环境
都是环境 environment 给的奖励 reward ,每当 agent 做出一个 action , environment 就会更新状态 state ,并且会给 agent 一个奖励 。每一个奖励 都依赖于前一个状态和动作。所以
。每一个奖励 都依赖于前一个状态和动作。所以 Return 依赖于从 时刻开始所有的动作
时刻开始所有的动作 action 和所有的状态 state 。
未来的状态  和 未来的动作
和 未来的动作 都是随机变量,动作
都是随机变量,动作 action 的随机性来自 policy 函数 ,动作
,动作 action 是根据  函数计算得到的每个动作的概率值,随机抽样得到的。状态
函数计算得到的每个动作的概率值,随机抽样得到的。状态 state 的随机性来自于状态转移函数  ,新的状态是根据状态转移函数 随机抽样得到的。
,新的状态是根据状态转移函数 随机抽样得到的。
未来的状态 和 未来的动作都是随机的。 依赖于这些动作和状态,所以 也是随机变量。 的值反映了未来奖励的总和。
所以想了解 的大小, 是随机变量,在  时刻并不知道 的值。所以要对 求期望,消除 中的随机性。期望是对未来的状态 和 未来的动作求取的,期望消除了这些随机变量,只剩下当前 时刻的状态和动作。通过求取期望我得到了
时刻并不知道 的值。所以要对 求期望,消除 中的随机性。期望是对未来的状态 和 未来的动作求取的,期望消除了这些随机变量,只剩下当前 时刻的状态和动作。通过求取期望我得到了  函数,被称为
函数,被称为 action-value function 。 函数跟 policy函数  、变量
、变量 和
和  有关,未来的随机性都被期望消除了,函数可以反映出当前状态 下,做动作的好坏程度。
有关,未来的随机性都被期望消除了,函数可以反映出当前状态 下,做动作的好坏程度。
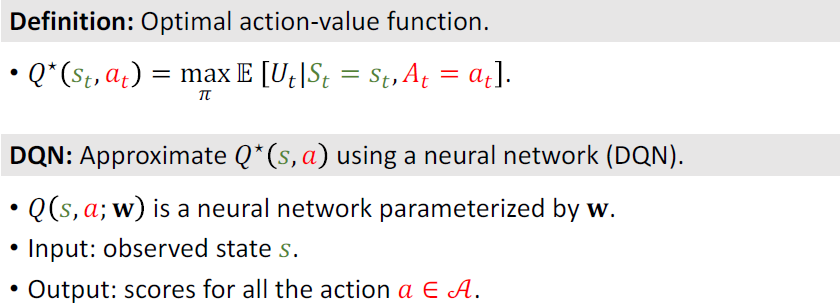
我们想进一步消除 policy函数 的影响,对函数关于 求最大化,得到 optimal action-value function 最优动作价值函数  。可以告诉我们,不管用什么
。可以告诉我们,不管用什么 policy函数 ,要使 agent 在当前状态 下做动作
下做动作 ,回报 的期望最大就是,不会更好。
,回报 的期望最大就是,不会更好。
跟策略函数无关,只要 agent 在当前状态下做动作,就是最好的结果了,哪怕之后policy函数 改进的更好,获得的期望回报也不可能更好。
:基于当前状态,做出动作的好坏程度。所以函数可以指导 agent 做决策。 agent 观测到当前状态,函数给所有的动作打分,比如:马里奥向上跳是3000分,←2000,→1000, agent 可以根据分数做决策,选择向上跳分数最高,这样才能达到期望和回报的最大化。
Deep Q-Network(DQN)
用神经网络近似函数。游戏中 agent 的目标是:打赢游戏,赢取更多的奖励。
目标订好, agent 就要努力实现目标。如果已知, agent 该如何做决策呢?什么是最好的动作呢?? 会给所有的动作打分,每个动作都有个分数。最好的动作是使得最大的
会给所有的动作打分,每个动作都有个分数。最好的动作是使得最大的 action 。
就是一个先知,能够预见未来的结果,比如有三只股票,问应该买哪一只股票。未来是充满随机性的,什么都可能发生。先知没有办法告诉确定的答案,只能告诉一个平均值。说平均来看,A股票涨了10倍,B涨了2倍,C跌了一半,先知还告诉你实际发生的情况和平均值并不一样。从期望来看,还是A股更好。
如何理解?可以告诉我们每个动作带来的平均回报,我们应该选择平均回报更多的动作,我们希望有,指导 agent 做决策,但是实际上我们不知道的。
价值学习的基本思想就是:学习一个函数近似。
DQN是一种价值学习方法,使用神经网络近似函数。该神经网络记做 ,其参数为
,其参数为 ,输入为状态,输出为很多数值(针对每个动作的打分)。通过奖励
,输入为状态,输出为很多数值(针对每个动作的打分)。通过奖励 reward 学习神经网络,神经网络对动作的打分也会越来越准确。

根据当前观测到的状态,用DQN把作为输入,对每个动作 action 进行打分,选出分数最高的动作作为, agent 执行这个动作之后,环境会改变状态(使用状态转移函数随机抽样得到一个新的状态 ),环境还会给
),环境还会给 agent 奖励 。奖励
。奖励 reward 就是强化学习中的监督信号,DQN要靠这些奖励来训练。有了新的状态,DQN再次对所有的动作进行打分,执行相同的流程,直到游戏结束。
Temporal Difference(TD) Learning
如何训练DQN呢,TD算法是常用的算法,TD算法不好理解,举个例子:
开车从纽约到亚特兰大,模型 可以预测时间开销,模型一开始告诉我(预测)从纽约到亚特兰大需要1000mins,一开始模型预测的不准确,或者干脆就是随机的。但是随着数据越来越多,模型训练,其就会越来越准确。
可以预测时间开销,模型一开始告诉我(预测)从纽约到亚特兰大需要1000mins,一开始模型预测的不准确,或者干脆就是随机的。但是随着数据越来越多,模型训练,其就会越来越准确。
我需要什么数据,得到数据之后如何更新模型?
- 出发之前,模型预测出一个值
 (模型预测)
(模型预测) - 我们真实的从NYC到亚特兰大,然后得到一个真实值
 (真实的时间开销)
(真实的时间开销) - 将
 记做
记做 target, 与 不同,这就说明预测有偏差,所以计算
与 不同,这就说明预测有偏差,所以计算 loss,进行梯度下降更新参数。
以上流程,必须完成整个旅途,才能对整个模型参数做更新。但是又有一个问题,如果我的目标是从纽约到亚特兰大,但是跑到华盛顿,汽车就坏了,到不了终点,那应该是怎么办呢?
我开车从纽约到DC,发现实际用时300mins,模型进行预测从DC到亚特兰大用时600mins,模型Q(w)=1000,但是根据模型新的预测,从NYC到Atlanta总共花费900mins,在TD算法中,900mins就是TD Target,TD Target虽然也是个估计值(但是有真实值,有事实成分),但是要比纯粹估计的1000mins更加精确可靠。越接近Atlanta,TD Target越准确,越接近真实值。
TD算法的目标:尽可能使得 TD error 接近0,预计时间等于实际时间(最理想情况)
TD Learning for DQN

想要使用TD算法,必须使用上图中相同的格式:等式左边有一项:DQN在 时刻做的估计,未来奖励总和的期望;等式右边有两项:真实观测值奖励 + DQN在
+ DQN在  时刻做的估计。
时刻做的估计。



Summary
本节主要讲解了 Value-Based Reinforcement Learning ,用到了 optimal action-value function 最优动作价值函数,首先对回报求期望,消除未来状态 和未来动作
和未来动作 的随机性,然后再关于
的随机性,然后再关于 policy 函数 求最大化,去掉了 函数的影响,得到了 函数,基于函数,可以得到基于当前状态,对所有动作打分,分数就能反映出每个动作的好坏。只要有了函数,就能根据函数来控制
函数,基于函数,可以得到基于当前状态,对所有动作打分,分数就能反映出每个动作的好坏。只要有了函数,就能根据函数来控制 agent 的动作,获得最高的回报。
然而实际上,我们并没有函数,价值学习的目标:就是学习一个函数来近似出函数。
DQN就是使用神经网络来近似函数,DQN的输入是状态,输出就是对每个动作的打分,如果拿超级玛丽来说, agent 只会做三个动作,所以输出就是一个 向量,
向量,
一开始参数都是随机的, agent 会根据DQN的指导,不断的尝试动作,并获得奖励。强化学习就是根据奖励来更新模型参数的。
TD算法是学习DQN最常用的方法:
- 观测当前的状态 和已经执行的动作;
- 用DQN做计算,输入是状态,输出是对的打分,输出记做
 ;
; - 反向传播对DQN求导。
- 由于
agent已经执行了动作,环境据此改变状态 ,并给
,并给 agent做出奖励; - 有了奖励,和状态,就可以计算出
TD Target ;
; - 做梯度下降,更新模型参数w

若有收获,就点个赞吧
0 人点赞
