背景
基本概念
支撑向量机(Support Vector Machine, SVM)的目的是在线性分类的基础上,找到鲁棒性最好的那条分类直线(超平面),所谓的鲁棒性最好,其实就是找到分类间隔最大的那个超平面(可参考林轩田教程)。
SVM的分类:
- Hard-margin SVM(最大间隔分类器);
- Soft-margin SVM;
- Kernel method;
约束优化必备知识
SVM的模型求解需要约束优化的相关知识,总结如下:
约束问题的形式如下:
定义Lagrange函数:
因此原问题等价于:
其对偶形式为:
注意
 ,也就是说,对偶问题的解小于等于原问题的解,若满足严格小于的条件,则成为弱对偶,否则为强对偶。
,也就是说,对偶问题的解小于等于原问题的解,若满足严格小于的条件,则成为弱对偶,否则为强对偶。
对偶问题的解小于等于原问题的解的几何解释: 为简化,我们设原问题:
对偶问题:
定义域为
。 构建区域
,如图所示。

,图中红色部分;
其中,
,根据直线
的位置可以确定
。
定义Slater条件:存在定义域 内部存在一点,满足不等式约束小于等于零严格成立:
内部存在一点,满足不等式约束小于等于零严格成立: 。对于凸优化问题,满足Slater条件时,原问题与对偶问题之间为强对偶关系。一般的凸优化问题都满足Slater条件,另外还有一种松弛的Slater条件,即只需令约束条件中仿射映射以外的函数满足Slater条件即可。
。对于凸优化问题,满足Slater条件时,原问题与对偶问题之间为强对偶关系。一般的凸优化问题都满足Slater条件,另外还有一种松弛的Slater条件,即只需令约束条件中仿射映射以外的函数满足Slater条件即可。
另一种与强对偶关系等价的时KKT(Karush-Kuhn-Tucker)条件:
- 可行域:
 ;
; - 互补松弛条件:
 ;
; - 梯度为零:
 ;
;
当满足KKT条件时,设原问题的解为 ,对偶问题的解为
,对偶问题的解为 时:
时:

 ,可见两个解等价,上述推导中,第一个红色等号用到了梯度为零的条件,第二个红色等号则用到了互补松弛条件。
,可见两个解等价,上述推导中,第一个红色等号用到了梯度为零的条件,第二个红色等号则用到了互补松弛条件。
Hard-margin SVM
模型构建
符号:
要实现最大间隔,求解模型可以概括为:
我们定义间隔值( )为数据点到超平面的最小距离:
)为数据点到超平面的最小距离:
 ,从而优化问题可以改写为:
,从而优化问题可以改写为:
 ,这里不妨取
,这里不妨取 ,这是因为该值不同的取值只是对
,这是因为该值不同的取值只是对 的等比例放缩,最终得到的是同一个分类超平面,因此优化问题进一步写为(注意,
的等比例放缩,最终得到的是同一个分类超平面,因此优化问题进一步写为(注意, ):
):

该问题转化为了包含N个约束的凸优化问题。
若N非常大,求解或遇到困难,引入Lagrange函数:
原问题等价无约束问题: ,其对偶形式为:
,其对偶形式为: ,由于约束条件全部为仿射函数,因此对偶解就是原问题的解。
,由于约束条件全部为仿射函数,因此对偶解就是原问题的解。
模型求解

代入L:

 ,
,

由此可得:
因此对偶问题为:
由于存在强对偶关系,因此优化问题也满足KKT条件:
 ;
; ;
; ;
; ;
;
从而得到:

计算得到这两个参数便得到了鲁棒性更好的决策超平面: ,而根据上面的表达式可知这些参数是满足
,而根据上面的表达式可知这些参数是满足 的向量的线性组合,这些满足条件的向量被称为支撑向量。
的向量的线性组合,这些满足条件的向量被称为支撑向量。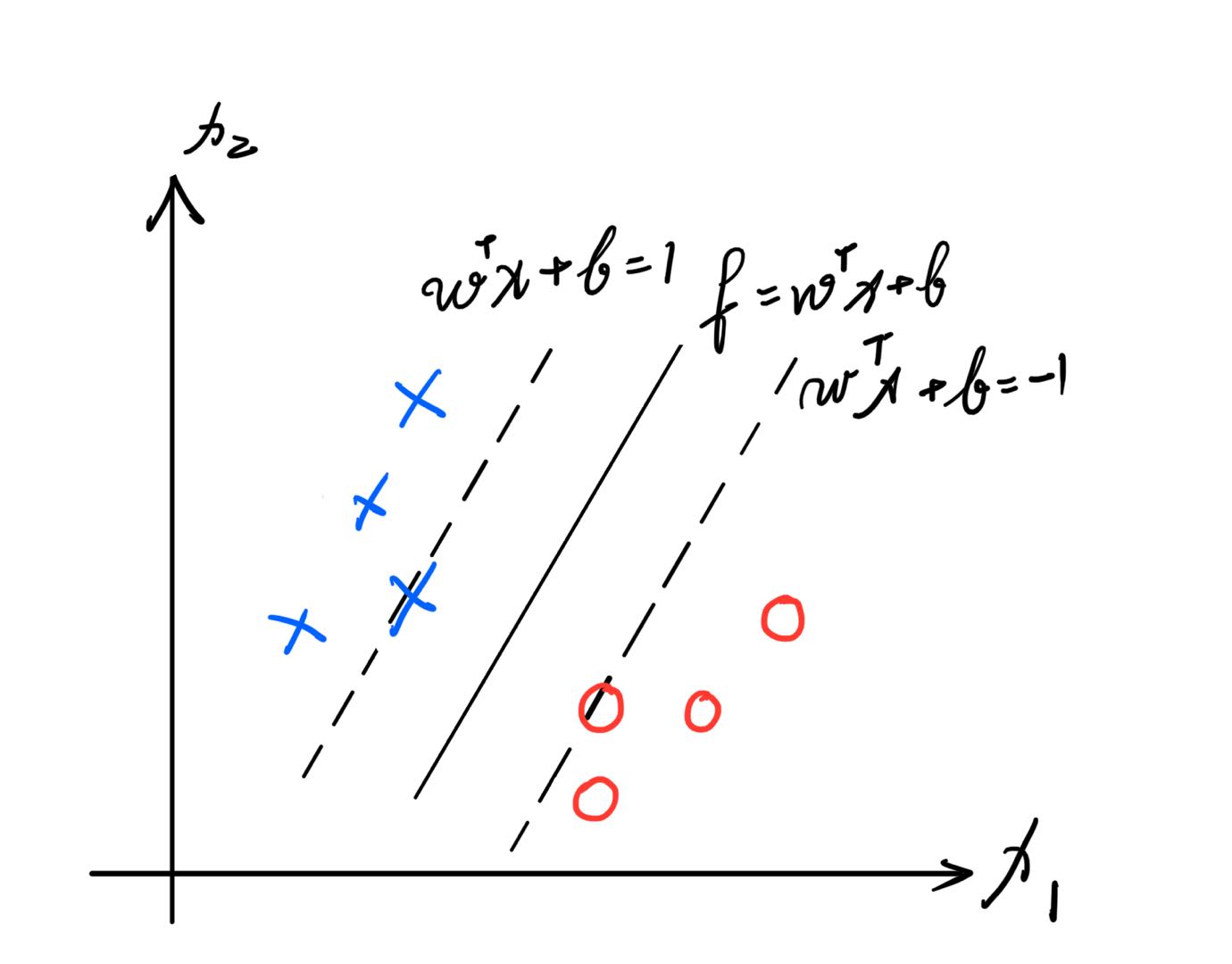
Soft-margin SVM
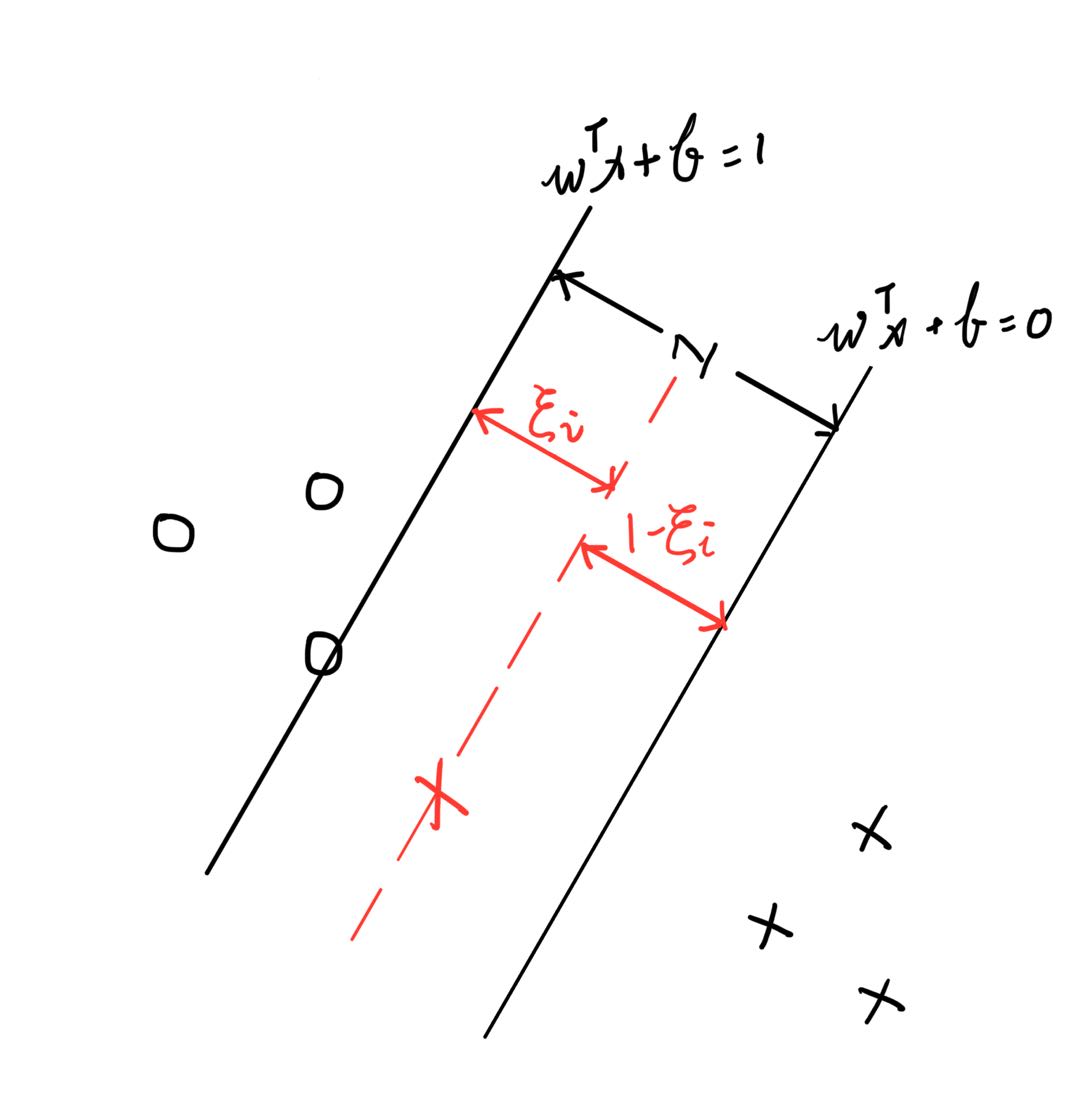
当数据是不可分的情况时,可以在损失函数中加入错误分类的可能性,错误分类的个数为: ,由于该函数不连续,因此可将其改写成:
,由于该函数不连续,因此可将其改写成: ,称之为Hinge function,将error引入Hard-SVM后得到:
,称之为Hinge function,将error引入Hard-SVM后得到:
其中的C为Hyperparameters代表错误水平,由人为设定,如果实际问题中,对错误的容许很低,例如加密工作等,就可以增大这个值来加大惩罚。对于被错误分类的点,我们假设该点与支撑向量所在超平面的距离为 ,自然距离是正定的即
,自然距离是正定的即 ;结合图可知此时约束可以被改写为:
;结合图可知此时约束可以被改写为: ,因此模型可改写为:
,因此模型可改写为:
核方法
背景
- 当数据严格不可分时,可以引入特征转化函数
 将其转为线性可分的数据集,例如将数据转为高纬度,高维化的数据比低维度的数据更容易线性可分;
将其转为线性可分的数据集,例如将数据转为高纬度,高维化的数据比低维度的数据更容易线性可分; - 引入特征函数后,其对偶形式造成了需要对特征函数求内积:
 ,
, 。而大量的内积运算求解困难,主要是特征函数
。而大量的内积运算求解困难,主要是特征函数 相对难求,为此引入核函数(kernel function)的概念。
相对难求,为此引入核函数(kernel function)的概念。
核函数的定义
满足如下条件的映射构成的函数被称为核函数:
满足内积性质的核函数,即 ,使得:
,使得:
其中 是Hilbert空间,则
是Hilbert空间,则 是正定核函数。
是正定核函数。
Hilbert空间: Hilbert是一个完备的(对极限运算封闭)可能是无限维的被赋予内积运算的线性函数空间,满足以下性质:
- 对称性:
;
- 正定性:
,当且仅当
时取等;
- 线性:
;
正定核函数的例子:

其中,取

,所以,

正定核函数的等价定义
如果核函数 满足:
满足:
- 对称性:
 ;
; - 正定性:
 ,对应的Gram矩阵(
,对应的Gram矩阵( )是半正定的;则
)是半正定的;则 为正定核函数。
为正定核函数。证明: 充分性: 内积定义使其满足对称性,记

 ,
其中,
,
其中, ;
; ,根据Hilbert空间的线性性质,
,根据Hilbert空间的线性性质, ,使得
,使得
 ,因此Gram矩阵K是半正定的。
必要性:
已知K是半正定矩阵,那么K的特征值
,因此Gram矩阵K是半正定的。
必要性:
已知K是半正定矩阵,那么K的特征值 ,且有分解:
,且有分解: ,令
,令 ,
, 是K的特征值
是K的特征值 对应的特征向量,因此:
对应的特征向量,因此:
 ,因此
,因此 是正定核函数。
证毕
是正定核函数。
证毕

若有收获,就点个赞吧
0 人点赞
