- BabyOS设计和使用手册
- 目录
- 1. 项目介绍
- 2. 设计思路
- 3. 快速体验
- 4. 进阶体验
- 5.概要介绍
- 6. 功能模块
- 7.工具模块
- 8. 参与开发
BabyOS设计和使用手册
V0.2.3
BabyOS V7.4.6
修订记录:
| 日期 | 记录 | 修订人 |
|---|---|---|
| 2022.03.18 | 编写初稿 | notrynohigh |
| 2022.06.05 | 增加功能模块详细介绍 | notrynohigh |
| 2022.06.06 | 修改按键模块的描述,文档对应代码的版本号 | notrynohigh |
目录
- BabyOS设计和使用手册
- 目录
- 1. 项目介绍
- 2. 设计思路
- 3. 快速体验
- 4. 进阶体验
- 5.概要介绍
- 6. 功能模块
- 7.工具模块
- 8. 参与开发
1. 项目介绍
BabyOS构想是搭建一个货架存放软件CBB(CommonBuildingBlock)。
不同产品、系统之间有许多共用的模块,这些模块调试稳定后放入货架作为积累。久而久之,货架上便有许多成熟的CBB供开发人员使用。减少大量重复劳动或者研发已经存在的成果。另一方面,如果产品是基于这些成熟的CBB搭建而成,产品的质量、进度都会得到更好的控制和保证。
货架的搭建和CBB积累并不是一个人可以完成的,需要集合众人的力量。于是2019年底发起了BabyOS开源项目。开发人员以兴趣为动力,无任何薪资报酬。坚持开源互助,共同进步。
2. 设计思路
BabyOS是想搭建一个货架,那么货架上是怎么存放东西的呢?这便决定了代码的结构。
3. 快速体验
以STM32F107进行说明。相关的例子在 https://gitee.com/notrynohigh/BabyOS_Example
3.1 准备基础工程
基础功能需要做到以下几点:
①MCU时钟及片内外的初始化:
初始化时钟、GPIO、滴答定时器和串口1。
②实现用于心跳的定时器:
将滴答定时器作为心跳时钟。
static void _ClockInit(){NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1 | RCC_APB2Periph_AFIO, ENABLE);}static void _GpioInit(){GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_Init(GPIOA, &GPIO_InitStructure);}static void _UartInit(){NVIC_InitTypeDef NVIC_InitStruct;USART_InitTypeDef USART_InitStructure;USART_InitStructure.USART_BaudRate = 115200;USART_InitStructure.USART_WordLength = USART_WordLength_8b;USART_InitStructure.USART_StopBits = USART_StopBits_1;USART_InitStructure.USART_Parity = USART_Parity_No;USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;USART_Init(USART1, &USART_InitStructure);USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);NVIC_InitStruct.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0;NVIC_Init(&NVIC_InitStruct);USART_Cmd(USART1, ENABLE);}void BoardInit(){_ClockInit();_GpioInit();_UartInit();}
//滴答定时器SysTick_Config(SystemCoreClock / TICK_FRQ_HZ);NVIC_SetPriority(SysTick_IRQn, 0x0);
3.2 添加BabyOS代码
| 路径 | 部分/全部 | 用于快速体验 |
|---|---|---|
| bos/algorithm | 根据需要添加 | 暂时不添加其中文件 |
| bos/core | 全部添加 | 全部添加 |
| bos/drivers | 根据需要添加 | 暂时不添加其中文件 |
| bos/hal | 全部添加 | 全部添加 |
| bos/mcu | 根据需要添加 | 添加bos/mcu/st/stm32f10x/路径代码 |
| bos/modules | 全部添加 | 全部添加 |
| bos/thirdparty | 根据需要添加 | 添加bos/thirdparty/nr_micro_shell/路径代码 |
| bos/utils | 全部添加 | 全部添加 |
| bos/_config | b_config.h 全局 配置文件 b_device_list.h 注册设备的文件 b_hal_if.h 驱动接口文件 |
编译器添加两个路径即可:
bos/
_config/ 如果配置文件拷贝到其他路径了,则添加相应路径即可。
3.3 修改配置
| 配置项 | 说明 | 用于快速体验 |
|---|---|---|
| Version Configuration | 版本配置项,硬件和固件版本 | 无改动 |
| Platform Configuration | 平台配置项,指定心跳频率和MCU平台 | MCU平台选择STM32F10X_CL |
| Hal Configuration | 硬件接口配置,可配置硬件接口参数是固定还是可变的 | 无改动 |
| Utils Configuration | 实用软件配置,部分软件代码的配置 | 无改动 |
| Modules Configuration | 模块配置项,各个功能模块的配置 | 无改动 |
| Thirdparty Configuration | 第三方开源代码配置项 | 勾选 NR Micro Shell Enable/Disable |
b_hal_if.h中指定DEBUG接口
#ifndef __B_HAL_IF_H__#define __B_HAL_IF_H__#include "b_config.h"// debug#define HAL_LOG_UART B_HAL_UART_1#endif
3.4 调用必要的函数
包含头文件 b_os.h
①滴答定时器中断服务函数调用 bHalIncSysTick();
void SysTick_Handler(){bHalIncSysTick();}
②调用bInit();bExec();`
int main(){BoardInit();SysTick_Config(SystemCoreClock / TICK_FRQ_HZ);NVIC_SetPriority(SysTick_IRQn, 0x0);bInit(); //bos初始化bShellInit(); //shell初始化while (1){bExec(); //bos执行函数}}
③由于勾选了shell功能模块,所以需要在串口接收中断服务函数里调用bShellParse,将数据喂给模块。
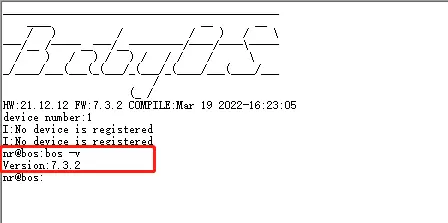
3.5 快速体验结果
BabyOS的shell模块默认支持查询版本的指令,输入 bos -v 便可以查询到版本。
4. 进阶体验
完成快速体验后,再体验设备的注册和相关操作。以SPIFlash为例进行说明。
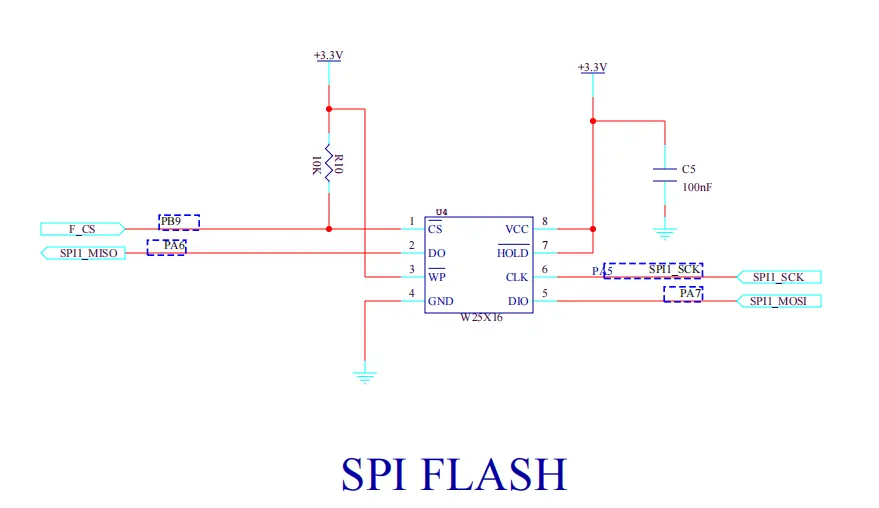
4.1 补充MCU资源初始化
在快速体验工程的基础上,增加了硬件SPI,和F_CS引脚。增加SPI的初始化以及GPIO的初始化。
代码省略….
4.2 添加驱动文件
添加 bos/drivers/b_drv_spiflash.c
BabyOS里面SPIFLASH的驱动是基于sfud代码编写。因此也要添加sfud部分的代码。
添加 bos/drivers/sfud/路径的代码。
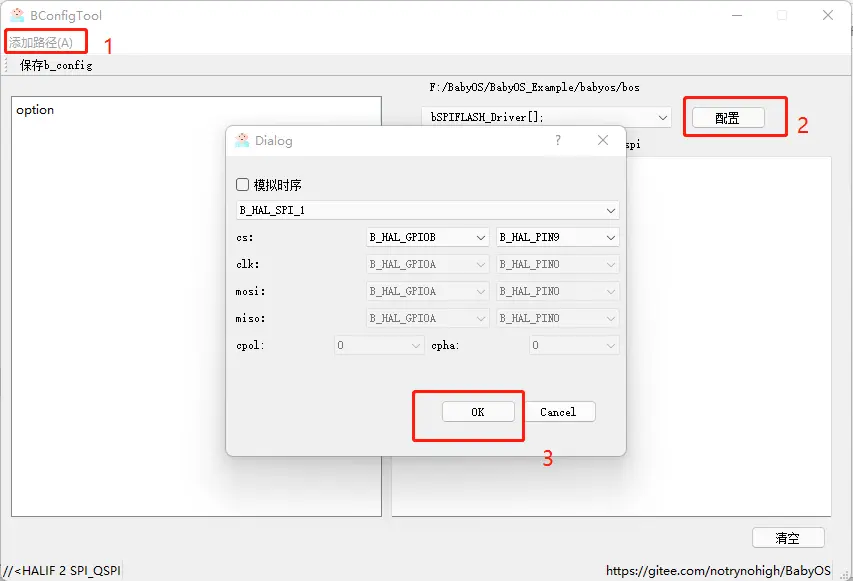
4.3 添加硬件接口
在b_hal_if.h里面添加硬件接口。
可利用BabyOS配置工具生成代码。https://gitee.com/notrynohigh/bconfig-tool/releases/V0.0.2

由于sfud需要知道有多少个SPIFLASH,所以在b_hal_if.h里面增加一个宏:
#define HAL_SPIFLASH_TOTAL_NUMBER 1
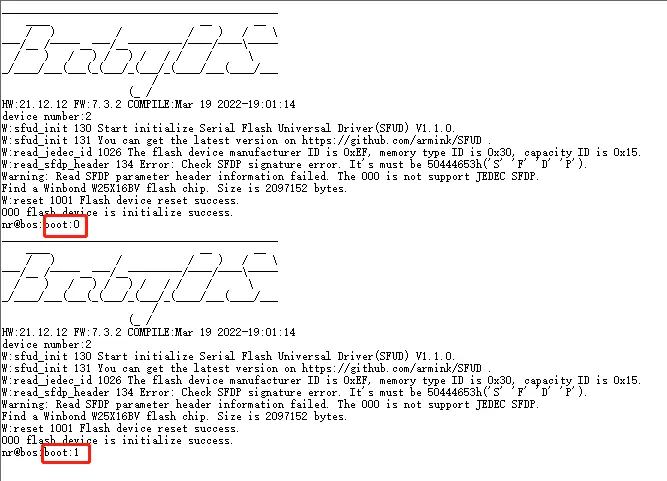
4.4 记录开机次数
在SPIFLASH的地址0x00000000记录开机次数,增加如下代码
int fd = -1;uint32_t boot_count = 0;fd = bOpen(bSPIFLASH, BCORE_FLAG_RW);bLseek(fd, 0);bRead(fd, (uint8_t *)&boot_count, sizeof(boot_count));b_log("boot:%d\r\n", boot_count);boot_count += 1;bFlashErase_t bFlashErase;bFlashErase.addr = 0;bFlashErase.num = 1;bCtl(fd, bCMD_ERASE_SECTOR, &bFlashErase);bLseek(fd, 0);bWrite(fd, (uint8_t *)&boot_count, sizeof(boot_count));bClose(fd);
5.概要介绍
5.1 添加MCU
bos/mcu/路径是存放已调试过的MCU型号,命名规则是:bos/mcu/厂商/型号/。
bos/hal/目录的文件及文件内定义的接口目前并不是很全,这部分的策略是:一点点添加,上层代码有需要时再添加。
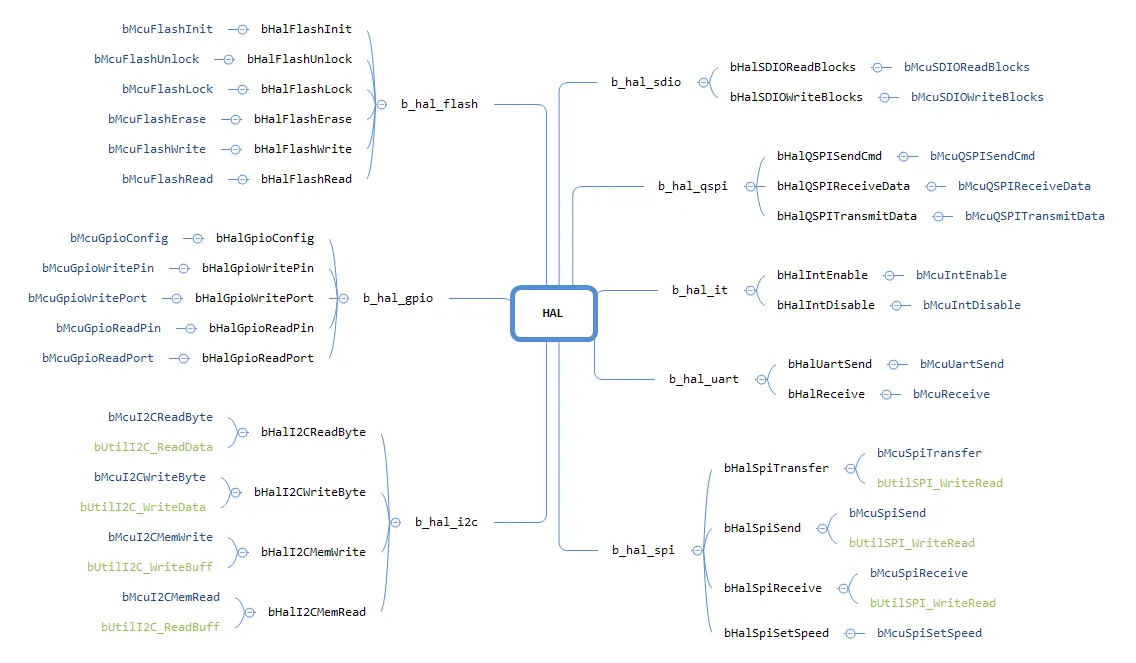
下图中黑色部分是HAL部分的内容,蓝色部分是MCU部分需要实现的,绿色部分是UTILS提供的模拟时序。
SPI和I2C接口支持模拟时序,HAL层判断是否使用模拟时序,然后调用对应接口。
因此新增MCU型号:
①新建目录,添加文件
②实现蓝色部分的接口
③修改_config/b_config.h,为MCU Platform增加一个选项
//<o> MCU Platform//<1001=> STM32F10X_LD//<1002=> STM32F10X_MD//<1003=> STM32F10X_HD//<1004=> STM32F10X_CL//<1101=> STM32G0X0//<2001=> NATION_F40X//<3001=> MM32SPIN2X//<3002=> MM32SPIN0X//<4001=> HC32L13X//<7001=> CH32F103#define MCU_PLATFORM 1004
5.2 HAL层介绍
Hal层一方面是给MCU层提供统一的接口。还有如下几点作用:
①提供心跳时间的查询
②提供微秒级和毫秒级延时函数
③提供通讯接口的数据结构
5.2.1 心跳时钟
使用BabyOS,需要给予一个心跳时钟。心跳时钟的频率在_config/b_config.h里定义TICK_FRQ_HZ,使用者自行实现一个定时器,并定时调用bHalIncSysTick。应用代码中可根据bHalGetSysTick获取心跳时钟计数值。
5.2.2 延时函数
提供bHalDelayMs和bHalDelayUs两个阻塞型延时函数。毫秒级延时是通过心跳计算的。微妙级函数是通过for循环阻塞。bHalInit中会计算微秒级延时所用到的参数,以此尽量保证微秒级函数的精准性。
5.2.3 通讯接口
HAL层提供通讯接口的数据结构:
//GPIOtypedef struct{bHalGPIOPort_t port;bHalGPIOPin_t pin;} bHalGPIOInstance_t;//I2Ctypedef struct{uint8_t dev_addr;uint8_t is_simulation;union{bHalI2CNumber_t i2c;struct{bHalGPIOInstance_t clk;bHalGPIOInstance_t sda;} simulating_i2c;} _if;} bHalI2CIf_t;//SPItypedef struct{uint8_t is_simulation;union{bHalSPINumber_t spi;struct{bHalGPIOInstance_t miso;bHalGPIOInstance_t mosi;bHalGPIOInstance_t clk;uint8_t CPOL;uint8_t CPHA;} simulating_spi;} _if;bHalGPIOInstance_t cs;} bHalSPIIf_t;//UARTtypedef enum{B_HAL_UART_1,B_HAL_UART_2,....B_HAL_UART_NUMBER} bHalUartNumber_t;//LCDtypedef struct{union{uint32_t rw_addr;struct{bHalGPIOInstance_t data;bHalGPIOInstance_t rs;bHalGPIOInstance_t rd;bHalGPIOInstance_t wr;bHalGPIOInstance_t cs;} _io;struct{bHalGPIOInstance_t rs;bHalSPIIf_t _spi;} _spi;} _if;uint8_t if_type; // 0: _io 1: rw_addr 2: _spi} bLCD_HalIf_t;
5.3 驱动层介绍
BabyOS操作设备的方式是,打开、读/写/控制,关闭。这么设计的想法是,打开(唤醒设备)然后对设备进行操作(读/写/配置),最后关闭(休眠设备)。
bos/driver/inc/b_driver.h里有一个数据结构:
typedef struct bDriverIf{int status;int (*init)(void);int (*open)(struct bDriverIf *pdrv);int (*close)(struct bDriverIf *pdrv);int (*ctl)(struct bDriverIf *pdrv, uint8_t cmd, void *param);int (*write)(struct bDriverIf *pdrv, uint32_t offset, uint8_t *pbuf, uint32_t len);int (*read)(struct bDriverIf *pdrv, uint32_t offset, uint8_t *pbuf, uint32_t len);void *_hal_if;union{uint32_t v;void * _p;} _private;} bDriverInterface_t;
每个驱动文件的目标便是实现bDriverInterface_t里面的各个元素。
status 驱动初始化异常则将 status 设为-1 反之设 为 0。 操作设备时检测此项,如果是-1 则不执行。
init 负责执行初始化,用于运行过程中再次初始化。
open 负责唤醒操作,此处可执行设备唤醒。如果设备没有休眠状态,可以赋值为 NULL 。
close 负责休眠的操作,此处可执行设备休眠。如果设备没有休眠状态,可以赋值为 NULL 。
ctl 负责对设备进行配置或者执行特定的操作,例如擦除,切换状态等。ctl 的调用需要传入指令 cmd 和对应的参数。 执 行成功返回 0,失败或者不支持指令则返回-1。
write 负责传输数据至设备,执行成功返回实际发送的数据长度,执行失败则返回-1。
read 负责从设备获取数据,获取数据的最小单元依据设备功能而定,例如,存储设备,最小可以获取 1 个字节;3 轴加速度设备,最小单元为 3 个加速度值;温湿度传感器最小单元是一组温度湿度值。读取的最小单元需 要在驱动的 h 文件进行说明让使用者能明白。
_hal_if 指向当前驱动对应的硬件接口。
private 当驱动需要携带私有参数时,则利用这个字段。例如 flash 的 id,可以放在 _private.v。如果需要存放更多的信息,那么就利用_private.p 指向一片数据区域。
5.3.1 硬件接口
每个驱动的硬件接口通过HAL_XXXX_IF指定,在驱动文件代码中会有如下一行代码:
HALIF_KEYWORD bXXXX_HalIf_t bXXXX_HalIfTable[] = HAL_XXXX_IF;//或HALIF_KEYWORD bXXXX_HalIf_t bXXXX_HalIf = HAL_XXXX_IF;
这两种分别对应哪种情况呢,通过下图可以看出。
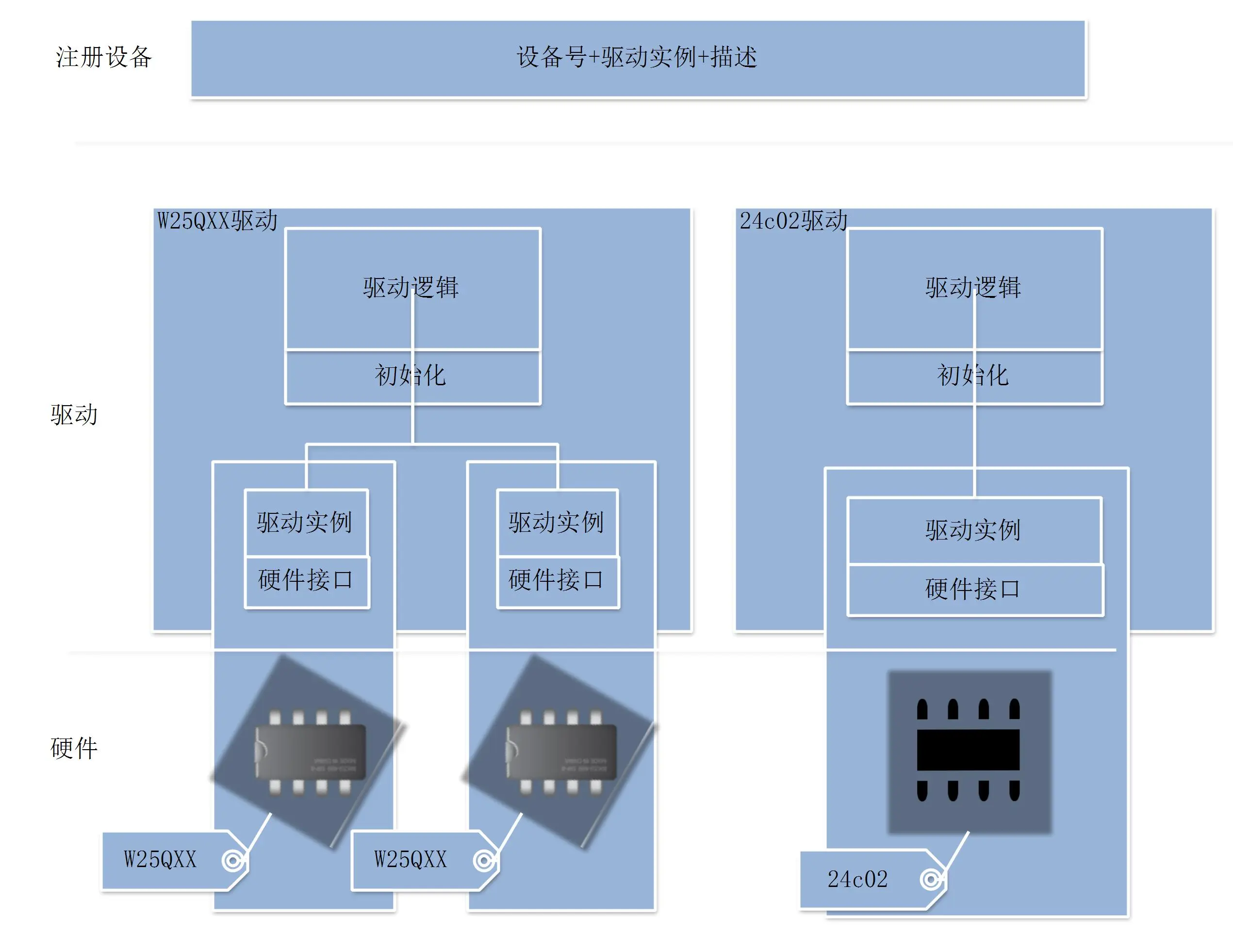
硬件接口的两种情况:
1)存在有相同设备的情况,例如接入 MCU 的有两个 Flash 芯片
2)当前驱动对应的设备不会存在多个,例如屏,一般只会接 1 块屏
第一种情况时,可通过如下宏获取当前的硬件接口:
#define bDRV_GET_HALIF(name, type, pdrv) type *name = (type *)((pdrv)->_hal_if)//例如:bDRV_GET_HALIF(_if, bSPIFLASH_HalIf_t, pdrv);//_if便是指向硬件接口的指针
5.3.2 注册设备
操作设备是通过设备号进行,那么注册设备便是将设备号与驱动实例进行绑定。bos/driver/inc/b_driver.h列出了已有的驱动实例。
b_device_list.h中通过宏进行注册:
B_DEVICE_REG(bSPIFLASH, bSPIFLASH_Driver[0], "spiflash")B_DEVICE_REG(bILI9341, bILI9341_Driver, "ili9341")
设备管理涉及到以下几个数据结构:
#define B_DEVICE_REG(dev, driver, desc)#include "b_device_list.h"typedef enum{#define B_DEVICE_REG(dev, driver, desc) dev,#include "b_device_list.h"bDEV_NULL,bDEV_MAX_NUM} bDeviceName_t;static bDriverInterface_t bNullDriver;static bDriverInterface_t *bDriverTable[bDEV_MAX_NUM] = {#define B_DEVICE_REG(dev, driver, desc) &driver,#include "b_device_list.h"&bNullDriver,};static const char *bDeviceDescTable[bDEV_MAX_NUM] = {#define B_DEVICE_REG(dev, driver, desc) desc,#include "b_device_list.h""null",};
设备注册便是填充了bDeviceName_t bDriverTable bDeviceDescTable ,以设备号为索引,可以从bDriverTable找到对应的驱动实例,从bDeviceDescTable中找到设备的描述。
5.3.3 操作设备
int bReinit(uint8_t dev_no);int bOpen(uint8_t dev_no, uint8_t flag);int bRead(int fd, uint8_t *pdata, uint16_t len);int bWrite(int fd, uint8_t *pdata, uint16_t len);int bCtl(int fd, uint8_t cmd, void *param);int bLseek(int fd, uint32_t off);int bClose(int fd);int bModifyHalIf(uint8_t dev_no, uint32_t type_size, uint32_t off, const uint8_t *pval,uint8_t len);
dev_no 注册设备时指定的设备号
fd 打开设备后返回的句柄,最多同时打开10(BCORE_FD_MAX)个设备。
配置项_HALIF_VARIABLE_ENABLE用于配置是否允许硬件接口可以改动。
#if _HALIF_VARIABLE_ENABLE#define HALIF_KEYWORD static#else#define HALIF_KEYWORD const static#endif
bModifyHalIf使用例子:
//oled硬件接口数据结构是 bOLED_HalIf_ttypedef struct{union{bHalI2CIf_t _i2c;bHalSPIIf_t _spi;} _if;uint8_t is_spi;} bOLED_HalIf_t;// 修改IIC的设备地址 OLED是注册的设备号,dev_addr变量存放着新的指。bModifyHalIf(OLED, sizeof(bOLED_HalIf_t),(uint8_t)(&(((bOLED_HalIf_t *)0)->_if._i2c.dev_addr)), &dev_addr, 1)
5.4 SECTION介绍
b_section.h定义段的操作。现有的段有如下几个:
bSECTION_DEF_FLASH(bos_polling, pbPoling_t);#define BOS_REG_POLLING_FUNC(func) //将func放入bos_polling段bSECTION_DEF_FLASH(driver_init_0, pbDriverInit_t);bSECTION_DEF_FLASH(driver_init, pbDriverInit_t);#define bDRIVER_REG_INIT_0(func) //将func放入driver_init_0段#define bDRIVER_REG_INIT(func) //将func放入driver_init段bSECTION_DEF_FLASH(b_mod_shell, static_cmd_st);#define bSHELL_REG_INSTANCE(cmd_name, cmd_handler) //将cmd信息放入b_mod_shell段bSECTION_DEF_FLASH(b_mod_param, bParamInstance_t);#define bPARAM_REG_INSTANCE(param, param_size) //将参数信息放入b_mod_param段
驱动文件最后会有一行这样的代码:bDRIVER_REG_INIT(bXXXX_Init);将初始化函数放入driver_init段。
//设备初始化时,将遍历driver_init_0和driver_init内的函数,并执行。int bDeviceInit(){memset(&bNullDriver, 0, sizeof(bNullDriver));bSECTION_FOR_EACH(driver_init_0, pbDriverInit_t, pdriver_init_0){(*pdriver_init_0)();}bSECTION_FOR_EACH(driver_init, pbDriverInit_t, pdriver_init){(*pdriver_init)();}return 0;}
int bExec(){//BabyOS的执行函数遍历需要轮询的函数即在bos_polling段的函数。bSECTION_FOR_EACH(bos_polling, pbPoling_t, polling){(*polling)();}return 0;}
当使用gcc编译时,需要编辑链接文件,在链接文件中补充这几个段,例如:
/* Define output sections */SECTIONS{....../* BabyOS Section -------------*/.driver_init :{. = ALIGN(4);PROVIDE(__start_driver_init = .);KEEP(*(SORT(.driver_init*)))PROVIDE(__stop_driver_init = .);. = ALIGN(4);} > FLASH.driver_init_0 :{. = ALIGN(4);PROVIDE(__start_driver_init_0 = .);KEEP(*(SORT(.driver_init_0*)))PROVIDE(__stop_driver_init_0 = .);. = ALIGN(4);} > FLASH.bos_polling :{. = ALIGN(4);PROVIDE(__start_bos_polling = .);KEEP(*(SORT(.bos_polling*)))PROVIDE(__stop_bos_polling = .);. = ALIGN(4);} > FLASH.b_mod_shell :{. = ALIGN(4);PROVIDE(__start_b_mod_shell = .);KEEP(*(SORT(.b_mod_shell*)))PROVIDE(__stop_b_mod_shell = .);. = ALIGN(4);} > FLASH/* BabyOS Section ---------end----*/......}
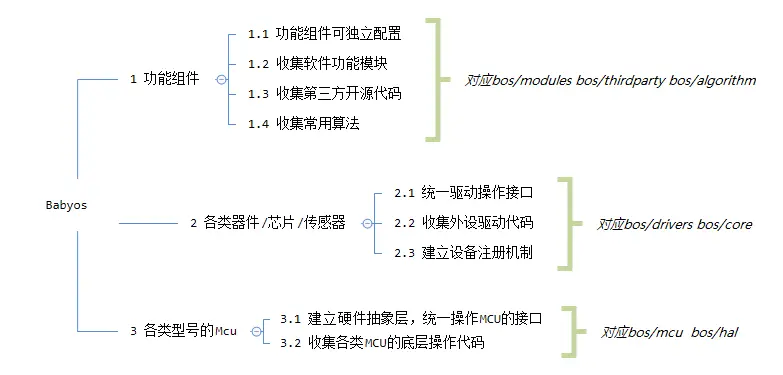
5.5 功能组件
功能组件包括: 功能模块、第三方开源代码,算法模块和工具模块。
| 组件 | 描述 | 代码 |
|---|---|---|
| 功能模块 | 收集BabyOS开发者编写的通用软件模块 | b_mod_adchub b_mod_button b_mod_error b_mod_fs b_mod_gui b_mod_kv b_mod_menu b_mod_modbus b_mod_param b_mod_protocol b_mod_pwm b_mod_shell b_mod_timer b_mod_trace b_mod_xm128 b_mod_ymodem |
| 第三方开源 | 收集第三方实用的开源代码 | cjson cm_backtrace fatfs flexiblebutton littlefs nr_micro_shell ugui sfud |
| 算法模块 | 收集常用的算法。目前这部分处于空白状态 | |
| 工具模块 | 支持其他各模块的通用代码 | b_util_at b_util_fifo b_util_i2c b_util_log b_util_lunar b_util_memp b_util_spi b_util_uart b_util_utc |
组件的每个部分都可以通过全局配置文件使能以及配置参数。组件中的代码,操作MCU资源只能调用HAL层接口,操作设备只能基于设备号进行操作。
组件中每个c文件功能单一,提供的功能接口放在对应的h文件。尽量做到,根据h文件的函数名便知道如何使用。
6. 功能模块
6.1 b_mod_adchub
6.1.1 数据结构
//回调 ad_val:ADC值 arg:用户指定传入的参数typedef void (*pAdchubCb_t)(uint32_t ad_val, uint32_t arg);typedef struct _AdcInfo{uint8_t seq; //序号,每个实例中序号不能一样uint8_t filter; //是否进行默认滤波处理uint8_t flag; //buf是否填充满uint8_t index; //当前喂入的数据放入buf的索引pAdchubCb_t callback; //回调函数uint32_t arg; //指定回调传入的参数uint32_t buf[FILTER_BUF_SIZE];struct _AdcInfo *next;struct _AdcInfo *prev;} bAdcInfo_t;typedef bAdcInfo_t bAdcInstance_t;//快速创建实例的宏,name:实例名 ad_seq:序号 filter_en:是否需要滤波 cb:回调 cb_arg:回调参数#define bADC_INSTANCE(name, ad_seq, filter_en, cb, cb_arg) \bAdcInstance_t name = { \.seq = ad_seq, \.filter = filter_en, \.callback = cb, \.arg = cb_arg, \}
6.1.2 接口介绍
//注册ADCHUB实例,所有注册的实例将组成列表int bAdchubRegist(bAdcInstance_t *pinstance);//喂ADC数据,ad_seq:ADC的序号 ad_val:ADC的值int bAdchubFeedValue(uint8_t ad_seq, uint32_t ad_val);
6.1.3 使用例子
//回调函数void _AdcCallback(uint32_t ad_val, uint32_t arg){b_log("%d:%d\r\n", arg, ad_val);if (arg == 2) //可以根据arg来判断是哪个实例的回调{//.....}}//此处定义实例,序号分别填的是10和16,在喂数据时候要对应//由于使用同一个回调函数,那么回调带入的参数要区分,分别是1 和 2bADC_INSTANCE(ADTest, 10, 1, _AdcCallback, 1);bADC_INSTANCE(ADTemp, 16, 1, _AdcCallback, 2);int main(){...bInit();//注册实例bAdchubRegist(&ADTest);bAdchubRegist(&ADTemp);...}//喂数据,中断里获取ADC值,然后喂数据void ADC1_2_IRQHandler(){uint32_t tmp = 0;if (ADC_GetITStatus(ADC1, ADC_IT_JEOC) == SET){ADC_ClearITPendingBit(ADC1, ADC_IT_JEOC);tmp = ADC_GetInjectedConversionValue(ADC1, ADC_InjectedChannel_1);bAdchubFeedValue(10, tmp);tmp = ADC_GetInjectedConversionValue(ADC1, ADC_InjectedChannel_2);bAdchubFeedValue(16, tmp);}}
6.2 b_mod_button
此功能模块是对第三方代码FlexibleButton的封装。支持独立按键和矩阵按键。
6.2.1 数据结构
//按键事件回调的数据类型typedef void (*pBtnEventHandler_t)(uint16_t event, uint8_t param);//按键事件,1个按键可以同时注册多个事件#define BTN_EVENT_DOWN (0x001)#define BTN_EVENT_CLICK (0x002)#define BTN_EVENT_DOUBLE_CLICK (0x004)#define BTN_EVENT_REPEAT_CLICK (0x008)#define BTN_EVENT_SHORT (0x010)#define BTN_EVENT_SHORT_UP (0x020)#define BTN_EVENT_LONG (0x040)#define BTN_EVENT_LONG_UP (0x080)#define BTN_EVENT_LONGLONG (0x100)#define BTN_EVENT_LONGLONG_UP (0x200)
6.2.2 接口介绍
//初始化,指定short long longlong的时长,单位msint bButtonInit(uint16_t short_xms, uint16_t long_xms, uint16_t llong_xms);//注册事件,id:按键的id event:事件 handler:处理事件的回调函数void bButtonRegEvent(uint8_t id, uint16_t event, pBtnEventHandler_t handler);
6.2.3 使用例子
b_config.h 配置独立按键的数量,配置矩阵按键的行和列
b_hal_if定义按键的硬件接口,顺序决定了按键的ID。
// Button//独立按键:{PORT, PIN, 按键按下时IO电平}#define HAL_B_BUTTON_GPIO \{ \{B_HAL_GPIOC, B_HAL_PIN4, 0}, {B_HAL_GPIOB, B_HAL_PIN10, 0}, \{B_HAL_GPIOC, B_HAL_PIN13, 0}, {B_HAL_GPIOA, B_HAL_PIN0, 0}, \}//矩阵按键,{{行对应的GPIO},{列对应的GPIO}}#define HAL_B_MATRIXKEY_GPIO {{{B_HAL_GPIOE, B_HAL_PIN8}, {B_HAL_GPIOE, B_HAL_PIN9}}, {{B_HAL_GPIOE, B_HAL_PIN10}, {B_HAL_GPIOE, B_HAL_PIN11}}}void BtnEventHandler(uint16_t event, uint8_t param){if (event == BTN_EVENT_CLICK){b_log("BTN_EVENT_CLICK\r\n");}if (event == BTN_EVENT_DOUBLE_CLICK){b_log("BTN_EVENT_DOUBLE_CLICK\r\n");}if (event == BTN_EVENT_SHORT){b_log("BTN_EVENT_SHORT\r\n");}if (event == BTN_EVENT_LONG){b_log("BTN_EVENT_LONG\r\n");}if (event == BTN_EVENT_LONGLONG){b_log("BTN_EVENT_LONGLONG\r\n");}}int main(){...bInit();bButtonInit(3000, 5000, 8000);//ID 0 对应PC4口接的按键bButtonRegEvent(0, BTN_EVENT_CLICK | BTN_EVENT_DOUBLE_CLICK, BtnEventHandler);//ID 1 对应PB10口接的按键bButtonRegEvent(1, BTN_EVENT_SHORT, BtnEventHandler);//ID 2 对应PC13口接的按键bButtonRegEvent(2, BTN_EVENT_LONG, BtnEventHandler);//ID 3 对应PA0口接的按键bButtonRegEvent(3, BTN_EVENT_LONGLONG, BtnEventHandler);//矩阵按键的ID在独立按键之后。矩阵按键的ID/* --------------->行key(4) key(5)key(6) key(7)*/#if _MATRIXKEY_ENABLEbButtonRegEvent(4, BTN_EVENT_CLICK | BTN_EVENT_DOUBLE_CLICK, BtnEventHandler);bButtonRegEvent(5, BTN_EVENT_SHORT, BtnEventHandler);bButtonRegEvent(6, BTN_EVENT_LONG, BtnEventHandler);bButtonRegEvent(7, BTN_EVENT_LONGLONG, BtnEventHandler);#endif...}
6.3 b_mod_error
6.3.1 数据结构
typedef void (*pecb)(uint8_t err); //错误发生后的回调#define INVALID_ERR ((uint8_t)0xFF)#define BERROR_LEVEL_0 0X00 //错误等级0,调用回调后自动从队列中移除#define BERROR_LEVEL_1 0X01 //错误等级1,需要手动从队列移除
6.3.2 接口介绍
//初始化并传入回调函数int bErrorInit(pecb cb);//注册错误,err:错误号 level:错误等级//interval_ms:间隔时间,level为BERROR_LEVEL_1时有效。//当错误发生后执行一次回调,如果错误没有被清除,则interval_ms时间后再次执行回调int bErrorRegist(uint8_t err, uint32_t interval_ms, uint32_t level);//清除指定的错误int bErrorClear(uint8_t e_no);//查询错误是否存在int bErrorIsExist(uint8_t e_no);//查询错误队列是否为空,即没有错误发生或者发生的错误都已经被处理int bErrorIsEmpty(void);
6.3.3 使用例子
#define BAT_LOW (0)#define MEM_ERR (1)void SystemErrCallback(uint8_t err){b_log_e("err:%d\r\n", err);}int main(){...bInit();bErrorInit(SystemErrCallback);bErrorRegist(BAT_LOW, 3000, BERROR_LEVEL_1); //当错误发生时调用bErrorRegist(MEM_ERR, 0, BERROR_LEVEL_0); //当错误发生时调用...}
6.4 b_mod_fs
6.4.1 数据结构
//定义了两个物理盘,SPIFLASH和SDCARDtypedef enum{#if _SPIFLASH_ENABLEE_DEV_SPIFLASH, /* Map SPIFLASH to physical drive*/#endif#if _SD_ENABLEE_DEV_SDCARD, /* Map MMC/SD card to physical drive*/#endifE_DEV_NUMBER,} FS_DEV_Enum_t;
6.4.2 接口介绍
//b_mod_fs是对接fatfs和littlefs//b_mod_fs主要是提供初始化函数,其他文件级操作使用fatfs或者littlefs提供的接口。//初始化函数int bFS_Init(void);//提供的测试函数,主要是通过文件的方式记录开机次数int bFS_Test(void);
6.4.3 使用例子
int main(){...bInit();bFS_Init();bFS_Test();...}
6.5 b_mod_gui
6.5.1数据结构
#define TOUCH_TYPE_RES (0)#define TOUCH_TYPE_CAP (1)#define LCD_DISP_H (0)#define LCD_DISP_V (1)//创建实例,实例名、LCD设备号、触摸设备号、物理尺寸、触摸类型#define bGUI_INSTANCE(name, _lcd, _touch, _x_size, _y_size, _touch_type) \bGUIInstance_t name = { \.lcd_dev_no = _lcd, \.touch_dev_no = _touch, \.touch_type = _touch_type, \.lcd_x_size = _x_size, \.lcd_y_size = _y_size, \};
6.5.2 接口介绍
此模块支持多个屏使用uGUI。UI设计使用ugui.h文件提供的接口。
// 注册GUI实例,返回GUI IDint bGUIRegist(bGUIInstance_t *pInstance);// 选择当前操作的目标,传入GUI IDint bGUISelect(uint8_t id);// 设置电阻屏触摸的AD值范围int bGUITouchRange(uint8_t id, uint16_t x_ad_min, uint16_t x_ad_max, uint16_t y_ad_min,uint16_t y_ad_max);// 设置屏幕显示方向,默认是LCD_DISP_Vint bGUIDispDir(uint8_t id, uint8_t dir);
6.5.3 使用例子
//定义两个实例,tft屏和oled屏bGUI_INSTANCE(tft, bSSD1289, bXPT2046, 240, 320, TOUCH_TYPE_RES);bGUI_INSTANCE(oled, bOLED, NULL, 128, 64, TOUCH_TYPE_RES);void TouchTest(){if(tft.gui_handle.touch.state == TOUCH_STATE_PRESSED){b_log("x:%d y:%d \r\n", tft.gui_handle.touch.xp, tft.gui_handle.touch.yp);}}int main(){......bInit();bGUIRegist(&tft);bGUIRegist(&oled);//设定电阻屏触摸的AD值范围bGUITouchRange(0, 476, 3952, 338, 3592);//选择ID 0的屏 即tft屏bGUISelect(0);UG_FillScreen(C_BLACK);UG_PutString(0, 0, "hello world");UG_PutString(0, 100, "babyos ssd1289");//选择ID 1的屏 即oled屏bGUISelect(1);UG_FillScreen(0);UG_PutString(0, 0, "hello world");UG_PutString(0, 20, "babyos oled");//再选择tft屏,并设置为横屏bGUISelect(0);bGUIDispDir(0, LCD_DISP_H);UG_PutString(0, 20, "babyos oled tft");while (1){bExec();//测试触摸BOS_PERIODIC_TASK(TouchTest, 500);}}
6.6 b_mod_kv
6.6.1 数据结构
//bKV的状态#define bKV_IDLE 0#define bKV_BUSY 1#define bKV_ERROR 2//bKV区域至少是有4个最小可擦除单位。//【数据索引1】【数据1】 【数据索引2】【数据2】#define bKV_SECTOR_T1 0X01#define bKV_SECTOR_T2 0X02#define bKV_SECTOR_D1 0X04#define bKV_SECTOR_D2 0X08#define bKV_SECTOR_ALL 0X0F//KV区域的标志字符串#define bKV_HEAD_STR "B_KV"#define bKV_ALIGN_4BYTES(n) (((n) + 3) / 4 * 4)
6.6.2 接口介绍
//初始化,dev_no:存储数据的设备号 s_addr:起始地址 size:存储区域尺寸 e_size:最小擦除单位大小int bKV_Init(int dev_no, uint32_t s_addr, uint32_t size, uint32_t e_size);//设置KV的数据int bKV_Set(const char *key, uint8_t *pvalue, uint16_t len);//读取KV数据int bKV_Get(const char *key, uint8_t *pvalue);//删除KV的KEYint bKV_Delete(const char *key);
6.6.3 使用例子
int main(){...bInit();bKV_Init(bSPIFLASH, 0x0, 40960, 4096);if(0 > bKV_Get("boot", (uint8_t *)&boot_count)){boot_count = 0;}b_log("boot : %d\r\n", boot_count);boot_count += 1;bKV_Set("boot", (uint8_t *)&boot_count, sizeof(boot_count));...}
6.7 b_mod_menu
6.7.1 数据结构
//更新UI的函数,pre_id:当前界面是从pre_id的界面切换过来typedef void (*pCreateUI)(uint32_t pre_id);//切换菜单的操作#define MENU_UP 1#define MENU_DOWN 2#define MENU_BACK 3#define MENU_ENTER 4
6.7.2 接口介绍
//增加同等级的菜单。创建第一个节点时,参考ID和界面ID值相同。int bMenuAddSibling(uint32_t ref_id, uint32_t id, pCreateUI f);//增加子级菜单int bMenuAddChild(uint32_t ref_id, uint32_t id, pCreateUI f);//菜单切换操作void bMenuAction(uint8_t cmd);//直接跳转到ID界面void bMenuJump(uint32_t id);//获取当前显示界面的IDuint32_t bMenuCurrentID(void);//设置ID界面的可视化状态,用于隐藏和显示界面int bMenuSetVisible(uint32_t id, uint8_t s);
6.7.3 使用例子
//定义4个按键进行菜单切换操作void BtnEventHandler0(uint16_t event, uint8_t param){bMenuAction(MENU_UP);}void BtnEventHandler1(uint16_t event, uint8_t param){bMenuAction(MENU_DOWN);}void BtnEventHandler2(uint16_t event, uint8_t param){bMenuAction(MENU_BACK);}void BtnEventHandler3(uint16_t event, uint8_t param){bMenuAction(MENU_ENTER);}//创建菜单。更多的代码,参考example仓库的例程。int bMenuInit(){bMenuAddSibling(LEVEL0_MENU0_ID, LEVEL0_MENU0_ID, Level0Menu0F);bMenuAddSibling(LEVEL0_MENU0_ID, LEVEL0_MENU1_ID, Level0Menu1F);bMenuAddSibling(LEVEL0_MENU1_ID, LEVEL0_MENU2_ID, Level0Menu2F);bMenuAddChild(LEVEL0_MENU0_ID, LEVEL1_MENU0_ID, Level1Menu0F);bMenuAddChild(LEVEL0_MENU1_ID, LEVEL1_MENU1_ID, Level1Menu1F);bMenuAddChild(LEVEL0_MENU2_ID, LEVEL1_MENU2_ID, Level1Menu2F);return 0;}
6.8 b_mod_modbus
6.8.1 数据结构
//这部分代码主要是提供RTU模式的主机读写功能//从机返回读数据结果的数据结构typedef struct{uint8_t func;uint8_t reg_num;uint16_t *reg_value;} bMB_ReadResult_t;//从机返回写数据结果的数据结构typedef struct{uint8_t func;uint16_t reg;uint16_t reg_num;} bMB_WriteResult_t;//传入回调函数的数据结构typedef struct{uint8_t type; // 0: read 1:writeunion{bMB_ReadResult_t r_result;bMB_WriteResult_t w_result;} result;} bMB_SlaveDeviceData_t;typedef void (*pMB_Send_t)(uint8_t *pbuf, uint16_t len);typedef void (*pMB_Callback_t)(bMB_SlaveDeviceData_t *pdata);//指定发送函数和回调函数typedef struct{pMB_Send_t f;pMB_Callback_t cb;} bMB_Info_t;typedef bMB_Info_t bModbusInstance_t;//可以通过这个宏快速创建实例,创建实例的时候指定发送和回调函数#define bMODBUS_INSTANCE(name, pSendData, pCallback) \bModbusInstance_t name = {.f = pSendData, .cb = pCallback};
6.8.2 接口介绍
//读取寄存器的值int bMB_ReadRegs(bModbusInstance_t *pModbusInstance, uint8_t addr, uint8_t func, uint16_t reg,uint16_t num);//写寄存器的值int bMB_WriteRegs(bModbusInstance_t *pModbusInstance, uint8_t addr, uint8_t func, uint16_t reg, uint16_t num, uint16_t *reg_value);//将接收到的数据喂给模块,让模块进行解析。解析正确后执行回调int bMB_FeedReceivedData(bModbusInstance_t *pModbusInstance, uint8_t *pbuf, uint16_t len);
6.8.3 使用例子
//...待添加
6.9 b_mod_param
6.9.1 数据结构
注意:使用此功能模块,需要同时使能shell功能模块
//size:变量的大小Byte name:变量名 addr:变量地址typedef struct{uint8_t size;char* name;void* addr;} bParamStruct_t;typedef bParamStruct_t bParamInstance_t;#define _PARAM2STR(n) (#n)//注册实例,指定需要调整的变量名和变量大小#define bPARAM_REG_INSTANCE(param, param_size) \bSECTION_ITEM_REGISTER_FLASH(b_mod_param, bParamInstance_t, CONCAT_2(do_, param)) = { \.size = param_size, .name = _PARAM2STR(param), .addr = &(param)};
6.9.2 接口介绍
//通过 #define bPARAM_REG_INSTANCE(param, param_size) 注册实例后,通过shell操作//例如变量名 i//param i 查询变量值//param i 8 设置变量名值为8
6.9.3 使用例子
static uint32_t TestTick = 0;//为了测试,变量值每秒增加1void TestParamF(){TestTick += 1;}//通过指令查询和调整TestTick的值bPARAM_REG_INSTANCE(TestTick, 4);int main(){...bInit();bShellInit();...while (1){bExec();BOS_PERIODIC_TASK(TestParamF, 1000);}}/*nr@bos:bos -vVersion:7.4.0nr@bos:param TestTick //查询变量值TestTick:19nr@bosparam TestTick //查询变量值TestTick:23nr@bosparam TestTick 0 //设置变量值为0nr@bosparam TestTick //再次查询TestTick:4nr@bos:*/
6.10 b_mod_protocol
此模块提供通用协议格式,测试软件(https://gitee.com/notrynohigh/BabyOS_Protocol/tree/master):
/**| | | | | | || :--- | ------------------ | ------------------- | ----- | -------- | ----- || Head | Device ID | Len(cmd+param) | Cmd | Param | Check || 0xFE | sizeof(bProtoID_t) | sizeof(bProtoLen_t) | 1Byte | 0~nBytes | 1Byte |*/
设备ID的长度以及len字段的长度可以在b_config文件进行配置。
设备ID:发送数据时,该字段是目标设备的ID , 如果设备ID为0xFFFFFFFF表示广播。
接收数据时,判断ID字段与自身的ID是否匹配。或者ID是否为0xFFFFFFFF。
6.10.1 数据结构
#if PROTO_FID_SIZE == 1typedef uint8_t bProtoID_t;#define INVALID_ID 0XFF#elif PROTO_FID_SIZE == 2typedef uint16_t bProtoID_t;#define INVALID_ID 0XFFFF#elsetypedef uint32_t bProtoID_t;#define INVALID_ID 0XFFFFFFFF#endif#if PROTO_FLEN_SIZE == 1typedef uint8_t bProtoLen_t;#elsetypedef uint16_t bProtoLen_t;#endif#pragma pack(1)typedef struct{uint8_t head;bProtoID_t device_id;bProtoLen_t len;uint8_t cmd;} bProtocolHead_t;#pragma pack()//分发函数,当接收的数据按照协议解析成功,则调用分发函数typedef int (*pdispatch)(uint8_t cmd, uint8_t *param, bProtoLen_t param_len);#define PROTOCOL_HEAD 0xFE
6.10.2 接口介绍
//初始化,指定设备自身的ID和分发函数int bProtocolInit(bProtoID_t id, pdispatch f);//修改设备IDint bProtocolSetID(bProtoID_t id);//将接收到的数据喂给模块进行解析int bProtocolParse(uint8_t *pbuf, bProtoLen_t len);//将数据根据协议打包。打包完成的数据放在pbuf,同时返回数据长度int bProtocolPack(uint8_t cmd, uint8_t *param, bProtoLen_t param_size, uint8_t *pbuf);
6.10.3 使用例子
//协议分发函数 cmd:指令 param:参数 param_len:参数长度int ProtocolDispatch(uint8_t cmd, uint8_t *param, bProtoLen_t param_len){b_log("cmd:%d param_len: %d\r\n", cmd, param_len);// 添加指令对应的执行代码return 0;}//接收空闲int ProtocolRecCallback(uint8_t *pbuf, uint16_t len){//接收完一段数据后,将数据给模块进行解析bProtocolParse(pbuf, len);return 0;}bUTIL_UART_INSTANCE(protocol, 128, 100, ProtocolRecCallback);int main(){...bInit();bProtocolInit(0x520, ProtocolDispatch);...}
6.11 b_mod_pwm
6.11.1 数据结构
#define PWM_HANDLER_CCR (0)#define PWM_HANDLER_PERIOD (1)//PWM回调函数,type: PWM_HANDLER_CCR or PWM_HANDLER_PERIODtypedef void (*pPwmHandler)(uint8_t type);typedef struct bSoftPwmStruct{uint32_t repeat; //指定重复次数,为0则一直重复uint32_t tick; //用于计时uint32_t period; //周期,单位msuint32_t ccr; //CCR,单位mspPwmHandler handler; //回调执行函数uint32_t flag; //执行回调标志struct bSoftPwmStruct *next;} bSoftPwmStruct_t;typedef bSoftPwmStruct_t bSoftPwmInstance_t;// 创建PWM实例,指定PWM的参数#define bPWM_INSTANCE(name, _period, _ccr, _repeat) \bSoftPwmInstance_t name = {.period = _period, .ccr = _ccr, .repeat = _repeat};
6.11.2 接口介绍
//启动PWM,并指定回调int bSoftPwmStart(bSoftPwmInstance_t *pPwmInstance, pPwmHandler handler);int bSoftPwmStop(bSoftPwmInstance_t *pPwmInstance);int bSoftPwmReset(bSoftPwmInstance_t *pPwmInstance);int bSoftPwmSetPeriod(bSoftPwmInstance_t *pPwmInstance, uint32_t ms);int bSoftPwmSetCcr(bSoftPwmInstance_t *pPwmInstance, uint32_t ms);
6.11.3 使用例子
bPWM_INSTANCE(led1_pwm, 20, 5, 0);bPWM_INSTANCE(led2_pwm, 20, 18, 0);void PwmHandler1(uint8_t type){if(type == PWM_HANDLER_CCR){bHalGpioWritePin(B_HAL_GPIOD, B_HAL_PIN7, 0);}else{bHalGpioWritePin(B_HAL_GPIOD, B_HAL_PIN7, 1);}}void PwmHandler2(uint8_t type){if(type == PWM_HANDLER_CCR){bHalGpioWritePin(B_HAL_GPIOD, B_HAL_PIN3, 0);}else{bHalGpioWritePin(B_HAL_GPIOD, B_HAL_PIN3, 1);}}int main(){...bInit();bSoftPwmStart(&led1_pwm, PwmHandler1);bSoftPwmStart(&led2_pwm, PwmHandler2);...}
6.12 b_mod_shell
此软件模块对接nr_micro_shell
6.12.1 数据结构
typedef void (*pCmdHandler)(char argc, char *argv);//注册指令和指令的执行函数#define bSHELL_REG_INSTANCE(cmd_name, cmd_handler)
6.12.2 接口介绍
//shell模块初始化//初始化后,添加了默认指令,bos -v 查询版本void bShellInit(void);//解析函数,接收的数据放入此处解析int bShellParse(uint8_t *pbuf, uint16_t len);
6.12.3 使用例子
int main(){...bInit();bShellInit();...}void USART1_IRQHandler(){uint8_t uart_dat = 0;if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET){USART_ClearITPendingBit(USART1, USART_IT_RXNE);uart_dat = USART_ReceiveData(USART1);bShellParse(&uart_dat, 1); //shell 解析}}
6.13 b_mod_timer
6.13.1 数据结构
//定时器回调typedef void (*pTimerHandler)(void);typedef struct bSoftTimerStruct{uint8_t repeat; //单次定时还是重复,0:单次 1:重复uint32_t tick;uint32_t period;pTimerHandler handler;struct bSoftTimerStruct *next;} bSoftTimerStruct_t;typedef bSoftTimerStruct_t bSoftTimerInstance_t;//创建实例的宏#define bTIMER_INSTANCE(name, _period, _repeat) \bSoftTimerInstance_t name = {.period = _period, .repeat = _repeat};
6.13.2 接口介绍
int bSoftTimerStart(bSoftTimerInstance_t *pTimerInstance, pTimerHandler handler);int bSoftTimerStop(bSoftTimerInstance_t *pTimerInstance);int bSoftTimerReset(bSoftTimerInstance_t *pTimerInstance);int bSoftTimerSetPeriod(bSoftTimerInstance_t *pTimerInstance, uint32_t ms);
6.13.3 使用例子
bTIMER_INSTANCE(timer1, 1000, 1);bTIMER_INSTANCE(timer2, 2000, 1);void Timer1Handler(){b_log("babyos\r\n");}void Timer2Handler(){b_log("hello \r\n");}int main(){...bInit();bSoftTimerStart(&timer1, Timer1Handler);bSoftTimerStart(&timer2, Timer2Handler);...}
6.14 b_mod_trace
当前软件模块对接的是CmBacktrace
6.14.1 数据结构
//...
6.14.2 接口介绍
int bTraceInit(const char *pfw_name); //初始化并指定固件名
6.14.3 使用例子
参考https://gitee.com/Armink/CmBacktrace/tree/master
6.15 b_mod_xm128
6.15.1 数据结构
//XMODEM回调,number是序号,pbuf是指向数据的指针,当pbuf为NULL时,表示接收完毕typedef void (*pcb_t)(uint16_t number, uint8_t *pbuf);//发送函数,用于发送指令typedef void (*psend)(uint8_t cmd);
6.15.2 接口介绍
//初始化,指定回调和发送函数int bXmodem128Init(pcb_t fcb, psend fs);//将接收的数据喂给模块进行解析int bXmodem128Parse(uint8_t *pbuf, uint8_t len);//XModem开始和停止int bXmodem128Start(void);int bXmodem128Stop(void);
6.15.3 使用例子
uint8_t FileBuf[1024];uint16_t FileLen = 0;//XModem回调void XModemCallback(uint16_t number, uint8_t *pbuf){if(pbuf != NULL){memcpy(&FileBuf[FileLen], pbuf, 128);FileLen += 128;}}//XModem 发送接口void XmodemSend(uint8_t cmd){bHalUartSend(HAL_LOG_UART, &cmd, 1);}//串口接收空闲,需要接收空闲后喂数据int UartIdleCallback(uint8_t *pbuf, uint16_t len){bXmodem128Parse(pbuf, len);return 0;}//建立串口接收实例bUTIL_UART_INSTANCE(XmodemRec, 200, 50, UartIdleCallback);int main(){...bInit();bXmodem128Init(XModemCallback, XmodemSend);//开始传输bXmodem128Start();...}void USART1_IRQHandler(){uint8_t uart_dat = 0;if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET){USART_ClearITPendingBit(USART1, USART_IT_RXNE);uart_dat = USART_ReceiveData(USART1);bUtilUartRxHandler(&XmodemRec, uart_dat);}}
6.16 b_mod_ymodem
6.16.1 数据结构
//ymodem回调。t:标题或者数据 pbuf:数据 len:数据长度typedef void (*pymcb_t)(uint8_t t, uint8_t *pbuf, uint16_t len);//发送接口typedef void (*pymsend)(uint8_t cmd);
6.16.2 接口介绍
//初始化,提供回调和发送接口int bYmodemInit(pymcb_t fcb, pymsend fs);//解析函数,收到的数据喂入进行解析int bYmodemParse(uint8_t *pbuf, uint16_t len);//YModem的开始和停止int bYmodemStart(void);int bYmodemStop(void);
6.16.3 使用例子
uint8_t FileBuf[1024];uint16_t FileLen = 0;//回调函数,t可以为文件名也可以是文件数据 pbuf是数据,当pbuf为NULL时结束 len是数据的长度void YModemCallback(uint8_t t, uint8_t *pbuf, uint16_t len){if(pbuf != NULL && (t == YMODEM_FILEDATA)){memcpy(&FileBuf[FileLen], pbuf, len);FileLen += len;}}//YModem发送接口void YmodemSend(uint8_t cmd){bHalUartSend(HAL_LOG_UART, &cmd, 1);}//串口接收空闲int UartIdleCallback(uint8_t *pbuf, uint16_t len){bYmodemParse(pbuf, len);return 0;}//串口接收实例bUTIL_UART_INSTANCE(YmodemRec, 1128, 50, UartIdleCallback);int main(){...bInit();bYmodemInit(YModemCallback, YmodemSend);//启动传输bYmodemStart();...}void USART1_IRQHandler(){uint8_t uart_dat = 0;if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET){USART_ClearITPendingBit(USART1, USART_IT_RXNE);uart_dat = USART_ReceiveData(USART1);bUtilUartRxHandler(&YmodemRec, uart_dat);}}
6.17 b_mod_iap
详细介绍:
https://gitee.com/notrynohigh/BabyOS/wikis/BabyOS固件升级功能
6.17.1 数据结构
/*** IAP状态,IAP介绍文档中有状态的切换路径*/#define B_IAP_STA_NULL (0)#define B_IAP_STA_START (1)#define B_IAP_STA_READY (2)#define B_IAP_STA_FINISHED (3)#define IS_IAP_STA(s) \(((s) == B_IAP_STA_NULL) || ((s) == B_IAP_STA_START) || ((s) == B_IAP_STA_READY) || \((s) == B_IAP_STA_FINISHED))#define B_IAP_FILENAME_LEN (64) // 固件名的长度限制#define B_IAP_FAIL_COUNT (3) // 固件失败的次数限制#define B_IAP_BACKUP_EN (0x55) // 备份固件功能启用的标志#define B_IAP_BACKUP_VALID (0xAA) // 存在有效备份固件的标志typedef struct{uint8_t dev_no; //暂存新固件的设备号,不需要暂存可以忽略char name[B_IAP_FILENAME_LEN]; //固件名,限制在64个字符uint32_t len; //固件长度uint32_t c_crc32; //固件数据CRC32校验值} bIapFwInfo_t;typedef struct{uint8_t dev_no; //备份区额设备号uint8_t flag; //备份标志,0xAA表示存在有效备份uint32_t fcrc; //备份区固件的crc32校验值uint32_t second; //运行多少秒后进行备份} bIapBackupInof_t;typedef struct{int stat;int fail_count;bIapFwInfo_t info;bIapBackupInof_t backup;uint32_t fcrc;} bIapFlag_t;
6.17.2 接口介绍
/*** 跳转是弱函数,用户可自己实现*/void bIapJump2Boot(void);void bIapJump2App(void);/*** boot和app都先调用bIapInit* 紧接着,按照不同的代码,调用bIapXXXCheckFlag()* XXX: Boot or App* 主要用于判断,进入启动程序和进入应用程序时,当前状态是否合法*//*** \param dev_no:固件暂存区的设备号* 注:暂存于内部FLASH 或 没有暂存区,dev_no = 0*/int bIapInit(uint8_t dev_no);/*** \return int 0:没有升级流程 1:升级流程正常运行中 -1:升级流程异常*/int bIapAppCheckFlag(void);int bIapBootCheckFlag(void);/*** 应用程序调用,表示升级流程开始。传入新固件的信息。*/int bIapStart(bIapFwInfo_t *pinfo);/*** 固件备份位置的设备号 dev_no* 注:备份到内部FLASH 则 dev_no = 0* 不需要固件备份,便不需要调用此函数。* s: 正常工作s秒后,进行固件备份*/int bIapBackupFwInit(uint8_t dev_no, uint32_t s);/*** \brief 传入新固件的数据用于写入存储区域* \param index 新固件数据的索引,即相对文件起始的偏移* \return int 0:正常存储 -1:存储异常 -2:校验失败,重新接收*/int bIapUpdateFwData(uint32_t index, uint8_t *pbuf, uint32_t len);/*** 查询当前IAP的状态* 应用程序,查询到是B_IAP_STA_READY状态,则跳转至启动程序* 启动程序,查询到是B_IAP_STA_NULL或者B_IAP_STA_FINISHED状态,则跳转至应用程序*/uint8_t bIapGetStatus(void);/*** 查询备份固件是否有效*/uint8_t bIapBackupIsValid(void);
6.17.3 使用例子
https://gitee.com/notrynohigh/BabyOS_Example/tree/BearPi/
例程仓库小熊派分支,利用BabyOS通用协议专用上位机进行固件升级
https://gitee.com/notrynohigh/BabyOS_Protocol
7.工具模块
7.1 b_util_at
7.1.1 数据结构
//at的回调,id:调用AT发送后返回的id result:运行的结果typedef void (*bAtCallback_t)(uint8_t id, uint8_t result);#define AT_INVALID_ID (0XFF)#define AT_STA_NULL (0)#define AT_STA_OK (1)#define AT_STA_ERR (2)#define AT_STA_ID_INVALID (3)
7.1.2 接口介绍
int bAtGetStat(uint8_t id);int bAtRegistCallback(bAtCallback_t cb);//将接收的数据喂给模块int bAtFeedRespData(uint8_t *pbuf, uint16_t len);//AT发送指令,发送的指令会放入队列,并返回id。//pcmd:at指令 cmd_len:指令长度 presp:期待的回复内容 resp_len:回复内容的长度//uart:串口号 timeout:允许的超时时间int bAtCmdSend(const char *pcmd, uint16_t cmd_len, const char *presp, uint16_t resp_len, uint8_t uart, uint32_t timeout);
7.2 b_util_fifo
7.2.1 数据结构
typedef struct{uint8_t * pbuf;uint16_t size;volatile uint16_t r_index;volatile uint16_t w_index;} bFIFO_Info_t;typedef bFIFO_Info_t bFIFO_Instance_t;//创建fifo实例#define bFIFO_INSTANCE(name, _fifo_size) \static uint8_t fifo##name[_fifo_size]; \bFIFO_Instance_t name = {.pbuf = fifo##name, .size = _fifo_size, .r_index = 0, .w_index = 0};
7.2.2 接口介绍
//FIFO的常用操作int bFIFO_Length(bFIFO_Instance_t *pFIFO_Instance, uint16_t *plen);int bFIFO_Flush(bFIFO_Instance_t *pFIFO_Instance);int bFIFO_Write(bFIFO_Instance_t *pFIFO_Instance, uint8_t *pbuf, uint16_t size);int bFIFO_Read(bFIFO_Instance_t *pFIFO_Instance, uint8_t *pbuf, uint16_t size);
7.3 b_util_i2c
7.3.1 数据结构
//模拟I2C的GPIO定义typedef struct{bHalGPIOInstance_t sda;bHalGPIOInstance_t clk;} bUtilI2C_t;
7.3.2 接口介绍
//模拟I2C的常用操作void bUtilI2C_Start(bUtilI2C_t i2c);void bUtilI2C_Stop(bUtilI2C_t i2c);int bUtilI2C_ACK(bUtilI2C_t i2c);void bUtilI2C_mACK(bUtilI2C_t i2c);void bUtilI2C_WriteByte(bUtilI2C_t i2c, uint8_t dat);uint8_t bUtilI2C_ReadByte(bUtilI2C_t i2c);int bUtilI2C_WriteData(bUtilI2C_t i2c, uint8_t dev, uint8_t dat);uint8_t bUtilI2C_ReadData(bUtilI2C_t i2c, uint8_t dev);int bUtilI2C_ReadBuff(bUtilI2C_t i2c, uint8_t dev, uint8_t addr, uint8_t *pdat, uint8_t len);int bUtilI2C_WriteBuff(bUtilI2C_t i2c, uint8_t dev, uint8_t addr, const uint8_t *pdat, uint8_t len);
7.4 b_util_spi
7.4.1 数据结构
//模拟SPI的GPIO定义和SPI参数typedef struct{bHalGPIOInstance_t miso;bHalGPIOInstance_t mosi;bHalGPIOInstance_t clk;uint8_t CPOL;uint8_t CPHA;} bUtilSPI_t;
7.4.2 接口介绍
//模拟SPI的读写操作uint8_t bUtilSPI_WriteRead(bUtilSPI_t spi, uint8_t dat);
7.5 b_util_log
在b_hal_if定义log输出的串口号。
7.5.1 接口介绍
#define b_log_i(...)#define b_log_w(...)#define b_log_e(...)#define b_log(...)
7.6 b_util_lunar
7.6.1 数据结构
//阴历数据结构typedef struct{uint16_t year;uint8_t month;uint8_t day;} bLunarInfo_t;
7.6.2 接口介绍
//阳历转阴历int bSolar2Lunar(uint16_t syear, uint8_t smonth, uint8_t sday, bLunarInfo_t *plunar);
7.7 b_util_memp
7.7.1 数据结构
//需要监控的信息,unused_unit 统计最小未使用量typedef struct{uint16_t unused_unit;} bMempMonitorInfo_t;//内存链表typedef struct bMempList{uint8_t *p;uint32_t total_size;uint32_t size;struct bMempList *next;struct bMempList *prev;} bMempList_t;
7.7.2 接口介绍
//申请和释放空间void *bMalloc(uint32_t size);void bFree(void *paddr);#if _MEMP_MONITOR_ENABLEvoid bMempGetMonitorInfo(bMempMonitorInfo_t *pinfo);#endif//内存链表初始化int bMempListInit(bMempList_t *phead);//申请空间存p指向的数据,再将此次申请的空间放入链表int bMempListAdd(bMempList_t *phead, uint8_t *p, uint32_t len);//释放链表中所有动态申请的内存int bMempListFree(bMempList_t *phead);//内存链表里存储的数据转为连续内存存储uint8_t * bMempList2Array(const bMempList_t *phead);
7.8 b_util_uart
7.8.1 数据结构
//串口接收空闲的回调typedef int (*pbUartIdleCallback_t)(uint8_t *pbuf, uint16_t len);typedef struct UtilUart{uint8_t *pbuf; //用于接收数据的存储区uint16_t buf_size; //存储区的大小volatile uint16_t index; //存储数据的索引uint32_t idle_thd_ms; //idle_thd_ms无新数据则判断空闲pbUartIdleCallback_t callback; //空闲回调uint32_t l_tick; //接收最后一个数据时的tick值uint32_t l_index; //接收最后一个数据时的索引struct UtilUart *next;struct UtilUart *prev;} bUitlUart_t;typedef bUitlUart_t bUitlUartInstance_t;//用于创建串口接收实例#define bUTIL_UART_INSTANCE(name, buf_len, idle_ms, cb) \static uint8_t Buf##name[buf_len]; \bUitlUartInstance_t name = { \.pbuf = Buf##name, \.buf_size = buf_len, \.idle_thd_ms = idle_ms, \.callback = cb, \.index = 0, \.l_tick = 0, \.l_index = 0, \.prev = NULL, \.next = NULL, \}
7.8.2 接口介绍
//将实例与串口号绑定void bUtilUartBind(uint8_t uart_no, bUitlUartInstance_t *pinstance);// bUtilUartRxHandler 和 bUtilUartRxHandler2 效果是一样// 但是,只有通过bUtilUartBind绑定串口号,才能调用bUtilUartRxHandler2void bUtilUartRxHandler(bUitlUartInstance_t *pinstance, uint8_t dat);void bUtilUartRxHandler2(uint8_t uart_no, uint8_t dat);// 获取当前BUF中已经收到的数据长度uint16_t bUtilUartReceivedSize(bUitlUartInstance_t *pinstance);uint16_t bUtilUartReceivedSize2(uint8_t uart_no);
7.9 b_util_utc
7.9.1 数据结构
typedef struct{uint16_t year;uint8_t month;uint8_t day;uint8_t week;uint8_t hour;uint8_t minute;uint8_t second;} bUTC_DateTime_t;typedef uint32_t bUTC_t;
7.9.2 接口介绍
//UTC与时间结构相互转换//UTC的起始时间是2000年1月1日0时0分0秒void bUTC2Struct(bUTC_DateTime_t *tm, bUTC_t utc);bUTC_t bStruct2UTC(bUTC_DateTime_t tm);
8. 参与开发
目前还需要广大开源爱好者的加入,将货架做稳固,再填充高质量的货物。
https://gitee.com/notrynohigh/BabyOS (主仓库)
https://github.com/notrynohigh/BabyOS (自动同步)
管理员邮箱:notrynohigh@outlook.com
开发者基于https://gitee.com/notrynohigh/BabyOS仓库dev分支进行。
有贡献的开发者(不局限于提交代码),记录到 http://babyos.cn/ 网站Team页面。
有意者随时私信联系!

若有收获,就点个赞吧
0 人点赞
