“快照”在 MVCC 里是怎么工作的?
在可重复读隔离级别下,事务在启动的时候就“拍了个快照”。注意,这个快照是基于整库的。
这时,你会说这看上去不太现实啊。如果一个库有 100G,那么我启动一个事务,MySQL 就要拷贝 100G 的数据出来,这个过程得多慢啊。可是,我平时的事务执行起来很快啊。
实际上,我们并不需要拷贝出这 100G 的数据。我们先来看看这个快照是怎么实现的。
InnoDB 里面每个事务有一个「唯一的事务 ID」,叫作「transaction id」。它是在「事务开始」的时候向 InnoDB 的事务系统申请的,是按申请顺序严格递增的。
而「每行数据也都是有多个版本」的。「每次事务更新数据的时候,都会生成一个新的数据版本」,并且把 transaction id 赋值给这个数据版本的事务 ID,记为 「row trx_id」。同时,旧的数据版本要保留,并且在新的数据版本中,能够有信息可以直接拿到它。
也就是说,数据表中的一行记录,其实可能有多个版本 (row),每个版本有自己的 row trx_id。
如图 2 所示,就是一个记录被多个事务连续更新后的状态。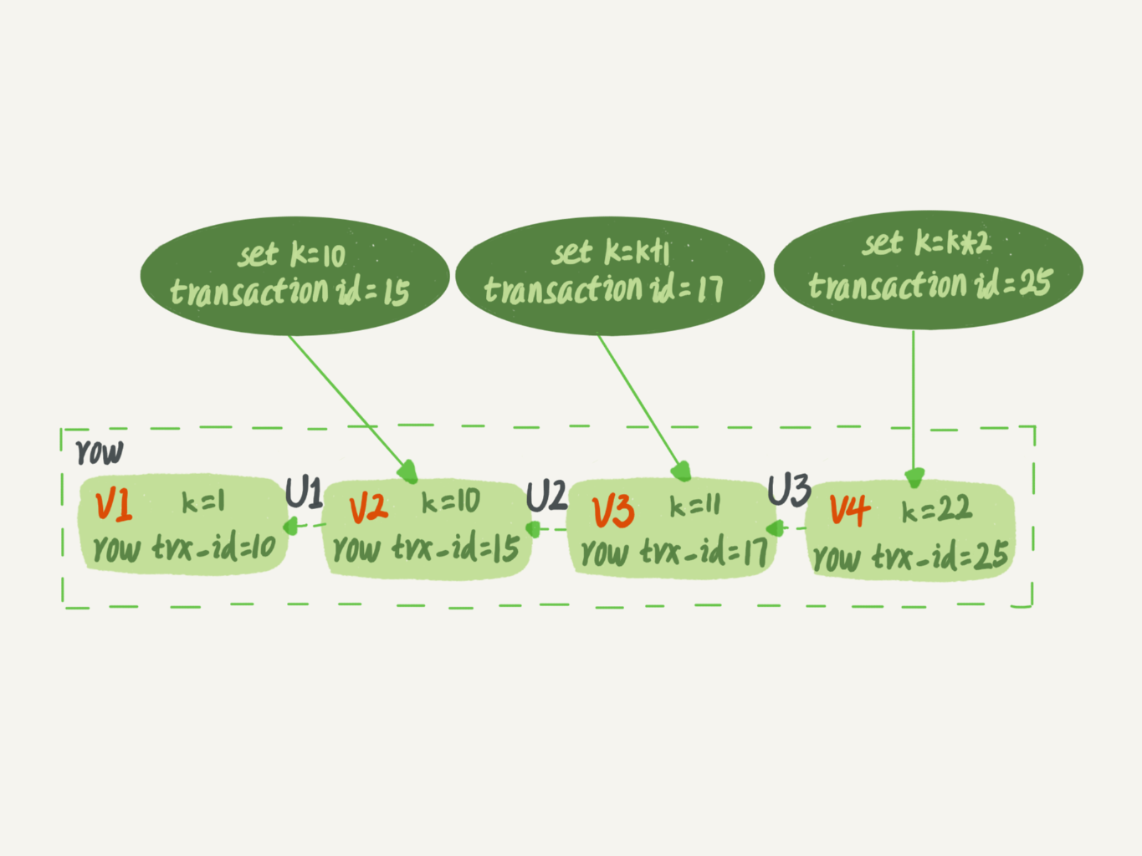
图中虚线框里是同一行数据的 4 个版本,当前最新版本是 V4,k 的值是 22,它是被 transaction id 为 25 的事务更新的,因此它的 row trx_id 也是 25。
你可能会问,前面的文章不是说,语句更新会生成 undo log(回滚日志)吗?那么,undo log 在哪呢?
实际上,图 2 中的三个虚线箭头,就是 undo log;而 V1、V2、V3 并「不是物理上真实存在的」,而是每次需要的时候根据当前版本和 undo log 计算出来的。比如,需要 V2 的时候,就是通过 V4 依次执行 U3、U2 算出来。
明白了多版本和 row trx_id 的概念后,我们再来想一下,InnoDB 是怎么定义那个“100G”的快照的。
按照可重复读的定义,一个事务启动的时候,能够看到所有已经提交的事务结果。但是之后,这个事务执行期间,其他事务的更新对它不可见。
因此,一个事务只需要在启动的时候声明说,“以我启动的时刻为准,如果一个数据版本是在我启动之前生成的,就认;如果是我启动以后才生成的,我就不认,我必须要找到它的上一个版本”。
当然,如果“上一个版本”也不可见,那就得继续往前找。还有,如果是这个事务自己更新的数据,它自己还是要认的。
在实现上, InnoDB 为每个事务构造了一个数组,用来保存这个事务启动瞬间,当前正在“活跃”的所有事务 ID。“活跃”指的就是,启动了但还没提交。
数组里面事务 ID 的最小值记为低水位,当前系统里面已经创建过的事务 ID 的最大值加 1 记为高水位。
这个视图数组和高水位,就组成了当前事务的一致性视图(read-view)。
而数据版本的可见性规则,就是基于数据的 row trx_id 和这个一致性视图的对比结果得到的。
这个视图数组把所有的 row trx_id 分成了几种不同的情况。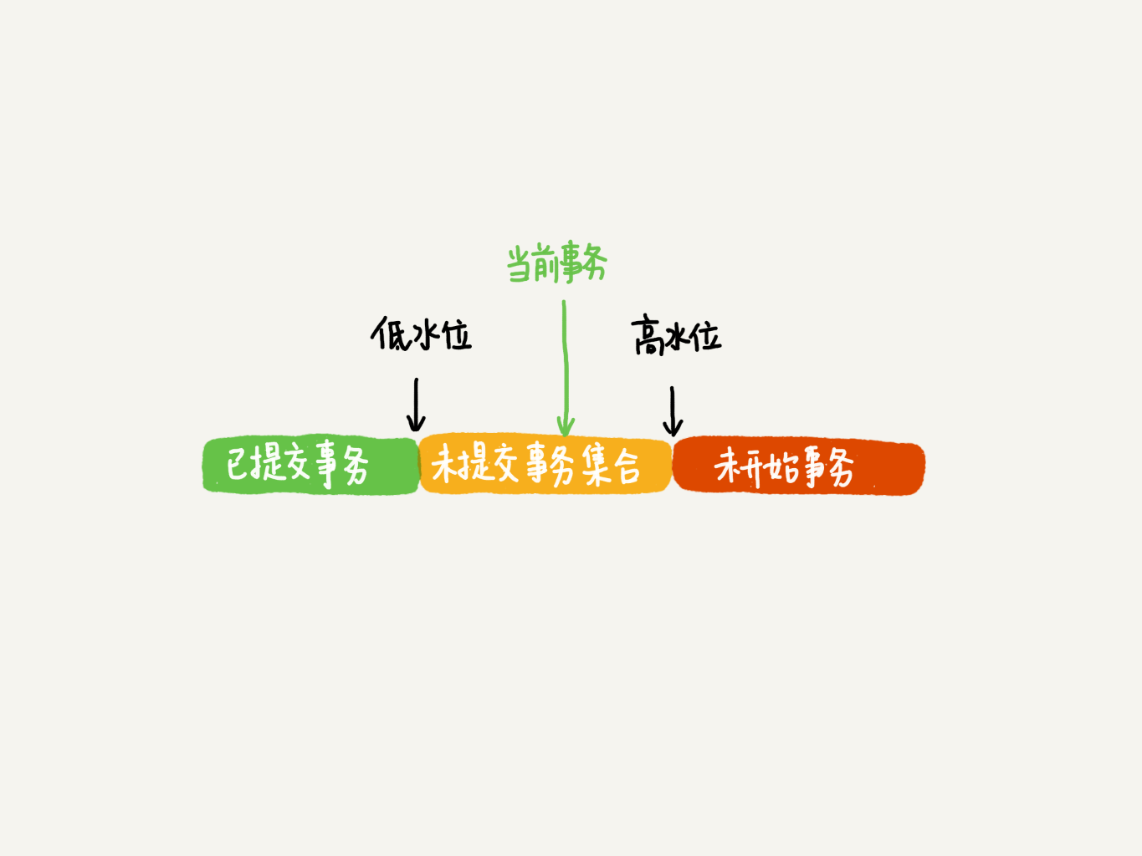
这样,对于当前事务的启动瞬间来说,一个数据版本的 row trx_id,有以下几种可能:
- 如果落在绿色部分,表示这个版本是已提交的事务或者是当前事务自己生成的,这个数据是可见的;
- 如果落在红色部分,表示这个版本是由将来启动的事务生成的,是肯定不可见的;
- 如果落在黄色部分,那就包括两种情况
a. 若 row trx_id 在数组中,表示这个版本是由还没提交的事务生成的,不可见;
b. 若 row trx_id 不在数组中,表示这个版本是已经提交了的事务生成的,可见。
比如,对于图 2 中的数据来说,如果有一个事务,它的低水位是 18,那么当它访问这一行数据时,就会从 V4 通过 U3 计算出 V3,所以在它看来,这一行的值是 11。
你看,有了这个声明后,系统里面随后发生的更新,是不是就跟这个事务看到的内容无关了呢?因为之后的更新,生成的版本一定属于上面的 2 或者 3(a) 的情况,而对它来说,这些新的数据版本是不存在的,所以这个事务的快照,就是“静态”的了。
所以你现在知道了,InnoDB 利用了“所有数据都有多个版本”的这个特性,实现了“秒级创建快照”的能力。

若有收获,就点个赞吧
0 人点赞
