1.什么是梯度下降?
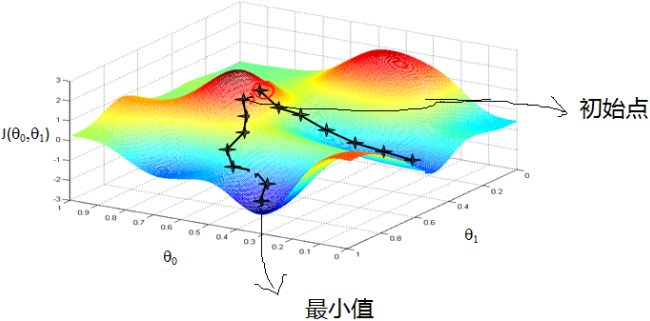
比如我们在一座大山上的某处位置,由于我们不知道怎么下山,于是决定走一步算一步,也就是在每走到一个位置的时候,求解当前位置的梯度,沿着梯度的负方向,也就是当前最陡峭的位置向下走一步,然后继续求解当前位置梯度,向这一步所在位置沿着最陡峭最易下山的位置走一步。这样一步步的走下去,一直走到觉得我们已经到了山脚。当然这样走下去,有可能我们不能走到山脚,而是到了某一个局部的山峰低处。从上面的解释可以看出,梯度下降不一定能够找到全局的最优解,有可能是一个局部最优解。当然,如果损失函数是凸函数,梯度下降法得到的解就一定是全局最优解。
2.梯度下降的实现
梯度下降和下山的场景类似,首先我们有一个函数,这个函数类比于山,我们的目标是找到函数的最小值,也就是山底。根据之前的理论,那么我们要走的就是找到最快的下山方式,也就是最陡峭的地方。对应到函数中,就是找到函数值下降最快的地方,也就是梯度的反方向(梯度的正方向为函数值上升最快的地方)。在函数中,梯度就是对函数求微分。
(1)对于单变量函数,以下是求微分的实例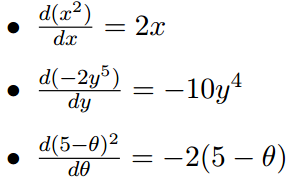
(2)对于多变量函数,求微分是分别对每个变量进行求微分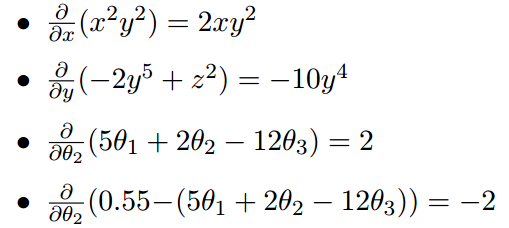
梯度实际上就是多变量微分的一般化。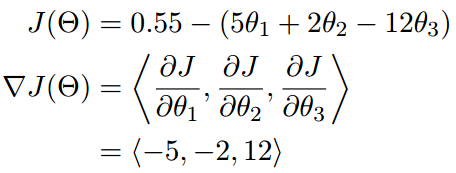
可以看到梯度就是分别对每个变量进行微分,然后用逗号分割开,梯度是用<>表示,说明梯度其实是一个向量。
(1)在单变量的函数中,梯度其实就是函数的微分,代表着函数在某个给定点的切线的斜率
(2)在多变量函数中,梯度是一个向量,向量有方向,梯度的方向就指出了函数在给定点的上升最快的方向
这也就说明了为什么我们需要千方百计的求取梯度:我们需要到达山底,就需要在每一步观测到此时最陡峭的地方,梯度就恰巧告诉了我们这个方向。
下面从数学上解释梯度下降算法的计算过程和思想。
此公式的意义是:J是关于Θ的一个函数,我们当前所处的位置为Θ点,要从这个点走到J的最小值点,也就是山底。首先我们先确定前进的方向,也就是梯度的反方向,然后走一段距离的步长,也就是α,走完这个段步长,就到达了Θ这个点。这里关键是对步长α的理解,α在梯度下降算法中被称作为学习率或者步长,意味着我们可以通过α来控制每一步走的距离,以保证不要步子跨的太大扯着蛋,其实就是不要走太快,错过了最低点。同时也要保证不要走的太慢,导致太阳下山了,还没有走到山下。有了以上的知识储备,我们就可以看几个梯度下降算法的小实例,首先从单变量的函数开始。梯度下降的计算公式

我们开始进行梯度下降的迭代计算过程: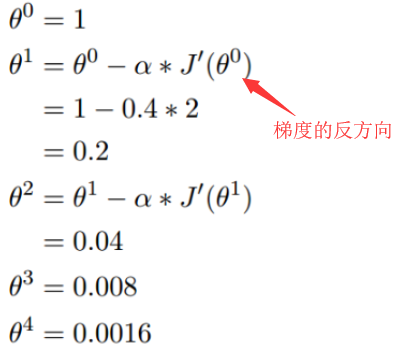
经过四次运算,就基本到达了函数的最低点,也就是山底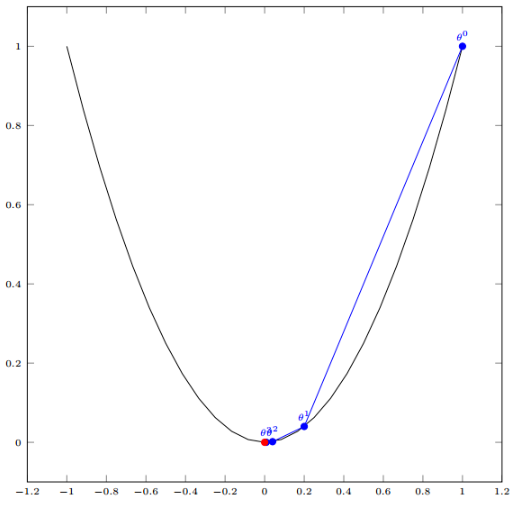
多函数梯度下降:
假设目标函数是
假设起点为
初始的学习率为
函数的梯度为
进行多次迭代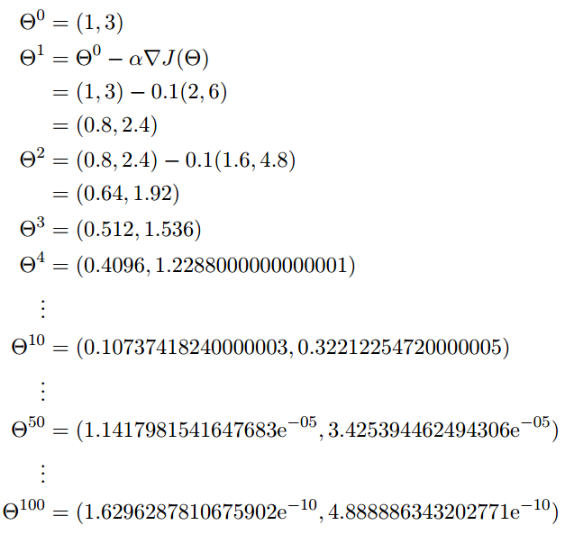
这个时候,基本接近函数的最小值点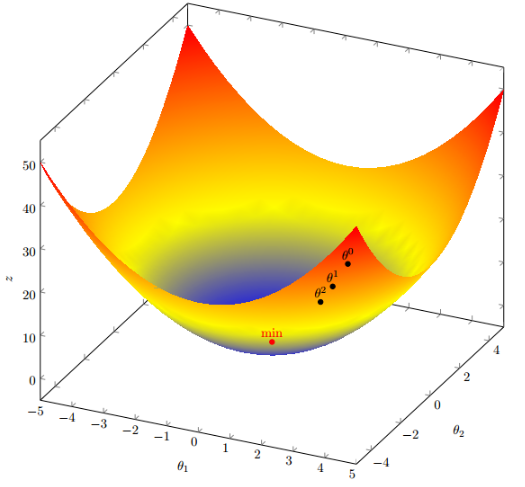
3.梯度下降用于拟合线性回归
下图是一个线性回归的例子,假设现在我们有一系列的点,如下图所示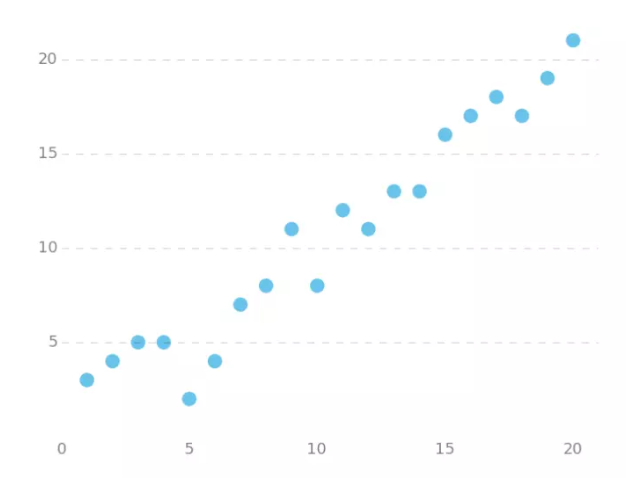
我们将用梯度下降法拟合出这条直线。首先,我们需要定义一个代价函数,代价函数是干什么的?是用来反映预测值和真实值之间差距问题的,对于点x,假设预测值用h(x)来表示,点x对应的真实值为y,那么预测值和真实值之间的差距可以表示为|h(x)-y|,假设图中共有m个点,那么总差距可以表示为,
平均代价可以表示为
在这里我们并不是要求出预测值和真实值之间具体的数值是多少,想想定义误差函数是为了什么?带绝对值的代价函数是我们自己定义的,它只是所有误差函数中的一种,是用来表示一个点的真实值和预测值之间的差值,我们用这个差值来表示代价函数,那差值的一半我们定义为代价函数可不可以,当然可以。平方可以吗,也是可以的。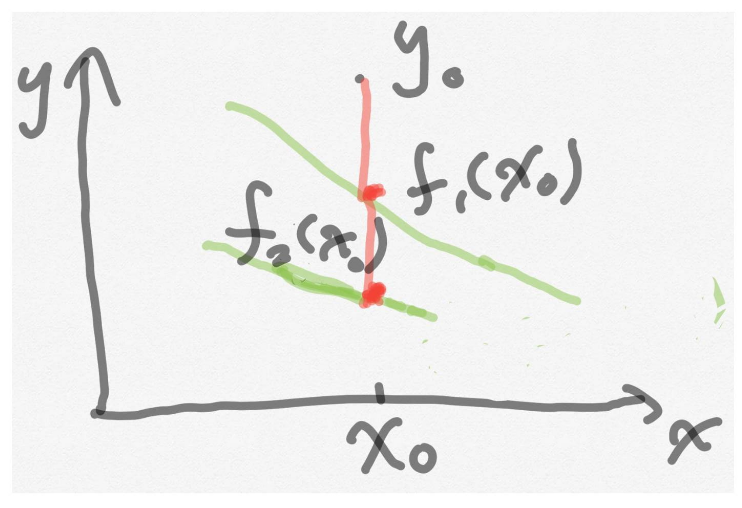
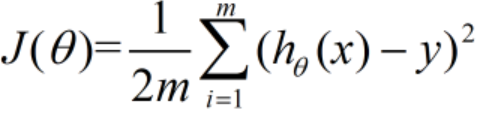
我们的目标是看这两条直线哪一个拟合得更好,由于评价规则对两条直线f(x)和f(x)是一样的,因此可以将绝对值转化为平方。代价函数(cost function)有五种,最常用的是均方误差代价函数,它可以写成如下形式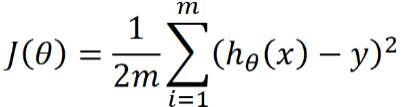
此公示中
(1)m是数据集中点的个数
(2)½是一个常量,这样是为了在求梯度的时候,二次方乘下来就和这里的½抵消了,自然就没有多余的常数系数,方便后续的计算,同时对结果不会有影响
(3)x、y 是数据集中每个点的真实x、y坐标的值,注意它们不是变量而是常量。
(4)h 是我们的预测函数,根据每一个输入x,根据h计算得到预测的y值,即
代价函数中的变量有两个:θ和θ,所以是一个多变量的梯度下降问题,求解出代价函数的梯度,也就是分别对两个变量进行微分。在对函数进行微分处理之前,首先搞清楚以下几点
(1)前面不是提出了线性回归吗?线性体现在哪里?
答 :线性体现在训练函数上,正是因为它是线性的,我们才可以写成如下的形式
这里要解决的其实就是求出θ和θ
(2)这里的代价函数作用是什么?
答:我们可以拟合出多条直线h(x),但是它们的拟合程度有好有坏,代价函数就是来评判好坏的。
(3)梯度下降在这里的作用是什么?
答:帮助我们找到最好的拟合直线,前面已经提到过,梯度的方向就是求函数最小值的方向。
我们如果把代价函数看作是我们处在山上的某个点,那么我们要做的就是找到这座山的最低点,沿着梯度的反方向就是它下降最快的地方。为什么要求下降最快的方向呢?关于这个问题目前还没有找到最确切的说法,以下是我自己思考的两个理由
(1)为什么要用梯度下降?因为方便,求导数然后取这个导数的负值就是梯度下降的方向。试想,我们如果来找一个沿着其他方向下降的,它有明确的公式吗?没有。梯度下降不仅下降最快还有明确的公式!!
(2)速度快,这点是非常重要的。再把求代价函数的最小值看作是一个下山的过程,那么这个下降的过程速度快慢有两个决定因素,第一是步长,第二是下降的方向,越快找到这个解越好,减少存储中间结果的内存。此外,下降的方向如果是最快的方向,那么对步长来说就有调整的空间了,因为如果下降的速度很慢,那么为了能尽快找到这个最小值,可能会采用较大的步长α,这样可能会错失最小值点。(下图选自Andrew NG 博客贴图)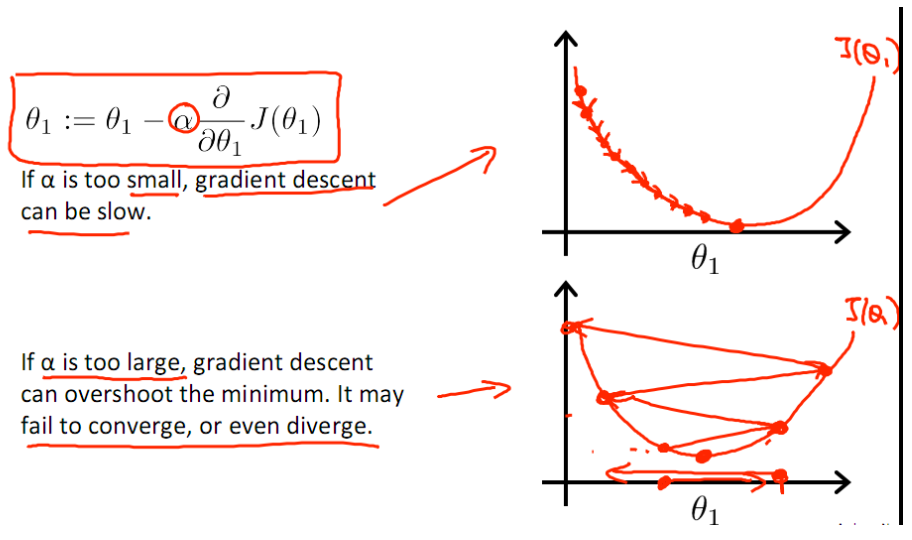
算法过程:
(1)算法相关参数初始化:主要是初始化终止距离ε以及步长α,在没有任何先验知识的时候,将步长初始化为1。在调优的时候再优化。
(2)确定当前位置的损失函数的梯度,对于θ,其梯度表达式如下:
(3)用步长乘以损失函数的梯度,得到当前位置下降的距离,即
(4)同理对θ求梯度,并求出当前位置下降的距离
(5)确定是否θ和θ的下降距离都小于初始化终止距离ε(这个值通常很小,说明这个时候已经下降不动多少了),如果都小于的话,则算法终止并且θ和θ即为最终结果;如果不是都小于初始化终止距离,进入下一步。
(6)更新θ和θ,此时它们的表达式为

(7)转入步骤2~5,看看这次是否两个参数θ和θ都小于初始化终止距离ε
4.代码实现
最后是coding time,前面已经将代价函数J(θ)表示为
h(x)由于是线性函数,它的一般表达式为:

假设函数的矩阵表达式为h(X)=Xθ,其中,h(X)为m1的向量,θ为(n+1)1的向量,里面有n+1个代数法的模型参数。X为m(n+1)维的矩阵,m代表样本的个数,n+1代表样本的特征数。这样损失函数就可以表达为:

其中Y是样本的输出向量,维度为m1.对J(θ)求偏导就有
PS:关于损失函数以及损失函数求偏导这个公式比较复杂,后面有时间在来研究
PPS:博客[1]和博客[2]在损失函数和损失函数求偏导这个地方有所出入,本文公式部分参照博客[2],代码部分参照博客[1]
# -*- coding: utf-8 -*-"""@author: Haojie Shu@time: 2019/03/18@description:梯度下降函数来拟合线性回归"""import numpy as npm = 20X0 = np.ones((m, 1)) # 创造全1数组,括号里的参数是shape,表示m行1列# np.arrange:创造等差数列,包含三个参数,第一个参数是起始值,第二个参数是步长,默认为1, 最后一个是终止值,左闭右开# np.reshape:对数列进行转置,它的标准形式是np.reshape(array, newshape),但是也可以像本例这样直接写成np.arrange.reshapeX1 = np.arange(1, m+1).reshape(m, 1)X = np.hstack((X0, X1)) # hstack将两个列向量合并,vstack表示两个行向量合并y = np.array([3, 4, 5, 5, 2, 4, 7, 8, 11, 8, 12, 11, 13, 13, 16, 17, 18, 17, 19, 21]).reshape(m, 1)alpha = 0.01 # alpha表示步长def error_function(theta, X, y):"""定义代价函数,差值的平方"""diff = np.dot(X, theta) - y # np.dot 两个向量的乘法# np.transpose 对数组进行转置return (1./2/m) * np.dot(np.transpose(diff), diff)def gradient_function(theta, X, y):"""代价函数的梯度"""diff = np.dot(X, theta) - yreturn (1./m) * np.dot(np.transpose(X), diff)def gradient_descent(X, y, alpha):"""梯度下降迭代计算"""theta = np.array([1, 1]).reshape(2, 1) # 初始出发点gradient = gradient_function(theta, X, y) # 在初始出发点这个地方求偏导while not np.all(np.absolute(gradient) <= 1e-5): # np.all,判断是否所有的数组元素都为Truetheta = theta - alpha * gradient # 第一趟:while语句不满足,theta的值发生改变gradient = gradient_function(theta, X, y) # 同样gradient的值也要改变,继续判断while语句是否满足return thetaoptimal = gradient_descent(X, y, alpha) # 满足条件时的theta的值print('optimal:', optimal)print('error function:', error_function(optimal, X, y)[0, 0]) # 代价函数的值,即用这个直线拟合,一共产生了多少误差
整理来自
1.《深入浅出—梯度下降法及其实现》https://www.jianshu.com/p/c7e642877b0e
2.《梯度下降(Gradient Descent)小结》https://www.cnblogs.com/pinard/p/5970503.html
5.后续
关于梯度下降,在前面其实花了很多的时间来了解前面的问题,即“为什么要用梯度下降来求损失函数的最小值?”,这个问题有一定的价值,但是没必要过分纠结。这里需要注意的是,由于梯度下降的计算量较大,所以它在实际算法中的应用是较少的,这里只需要搞清楚它的原理即可。后面重点了解梯度下降算法的升级版,随机梯度下降(Stochastic Gradient Descent,SGD)。

若有收获,就点个赞吧
0 人点赞
