- 硬件介绍
- 能源类—电源模块
- 通信类—红外收发
- 通信类—蓝牙模块
- 交互类—按钮模块
- 交互类—角度传感器
- 交互类—滑动电位器
- 交互类—摇杆
- 交互类—多路触摸
- 传感器类—光线传感器
- 传感器类—双路颜色传感器
- 传感器类—声音传感器
- 传感器类—热运动传感器
- 传感器类—超声波传感器
- 传感器类—测距传感器
- 传感器类—运动传感器
- 传感器类—土壤湿度传感器
- 传感器类—温度传感器
- 传感器类—温湿度传感器
- 传感器类—气体传感器
- 温度传感器—火焰传感器
- 传感器类—磁敏传感器
- 传感器—视觉模块
- 显示类—8×16 LED 点阵
- 灯效类—RGB灯
- 灯效类—彩灯驱动
- 播放类—扬声器
- 运动类—电机驱动
- 运动类—舵机驱动
- 外设类—红外遥控器
- 外设类—蓝牙传感器
- 配件类—延长模块
- 配件类—快速转接件
- 配件类—5V通用连接线
在2019 MakeX Spark 我的城市创意搭建赛中,我们推荐使用mbuild系列套件,mbuild 是 Makeblock(童心制物)研发的新一代电子模块平台,它在极度小巧的同时又高度智能,涵盖丰富的电子模块功能,并能与主流开源硬件结合使用。mbuild 电子模块无需编程即可使用,也能够通过 mBlock 或 MU 以积木块或是 Python 的方式对其编程进行控制。 mbuild 电子模块平台将能够充分满足您在创意物化、综合实践、项目制教学、编程普及、人工智能科普、 机器人赛事等场景中对于电子模块的需求。
硬件介绍
能源类—电源模块
打开电源模块上的开关,电源模块就能够为其他 mbuild 模块供电,使其正常工作。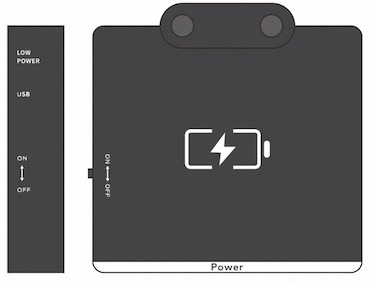
电源的灯效和含义
| 亮 | 灭 | |
|---|---|---|
| 绿灯 | 电源开启 | 电源关闭 |
| 红灯 | 低电量或正在充电 | 高电量或充电完成 |
参数
- 尺寸:48×48mm
- 电池容量:950mAh
- 电池电压:3.7V
- 放电倍率:3CC
- 续航时间:3小时(不同模块组合下存在较大波动)
- 充电时长:1.25小时
- 输出电压:DC 5V
- 放电电流:5V 1.5A,瞬间最大值 5V 2A
- 保护电流:5V 3A(保护后需要连接充电器重启模块)
- 输入电压:DC 5V
- 输入电流:<2A
- 工作温度:0℃~45℃
-
注意事项
使用电池前,请仔细阅读使用说明;
- 使用过程中,应远离热源,高压场所,并勿摔打,撞击电池;
- 废弃电池模块请妥善安全处理,切勿投入火中或水中;
- 在使用或储存期间,如发现电池有出现高温发热,漏液,散发异味,变形,及其他异常现象时,请立即停止使用;
通信类—红外收发
红外收发模块上集成了红外发射与红外接受功能,能够发射和接受940nm波段的红外信号。
生活实例


通信类—蓝牙模块
蓝牙模块能够使你的作品与 Makeblock 蓝牙适配器 或支持蓝牙4.0的设备建立无线连接,使你能够无线地控制你的作品。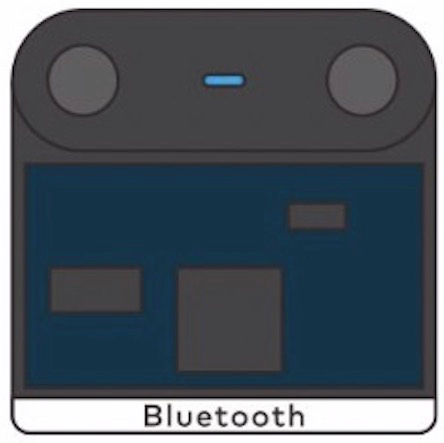
蓝牙的连接设置参看:通过蓝牙连接设备
蓝牙的灯效及含义
- 闪烁:蓝牙未被连接
- 常亮:蓝牙已连接,工作正常
-
参数
尺寸:24×24mm
- 推荐使用距离:10m以内
- 蓝牙版本:BT4.0
- 频带范围:2402~2480MHz
- 天线增益:1.5dBi
- 能耗等级:≤4dBm
- 工作电流:15mA
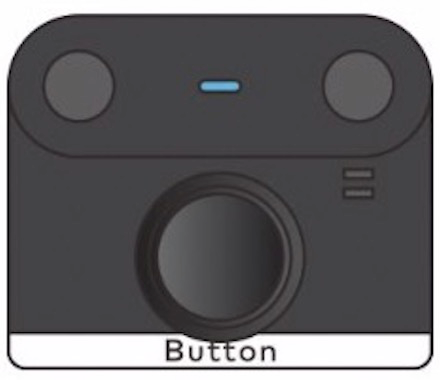
交互类—按钮模块
生活实例



交互类—角度传感器
角度传感器是由磁编码器制作而成,其可以精确检测旋转的位置。
角度传感器与旋钮不同,它可以连续旋转,检测转过的度数,以及实时的角速度。同时,角度传感器的转盘,可以和各类结构件组合,应对各种场景。
- 与 makeblock 金属零件组合
-
原理介绍
电磁学中,我们可以向一个长方形导体的两端施加电压,从而在一个方向上产生电流。此时,如果在通电的导体上施加一个与导体平面垂直的磁场,如下图所示:
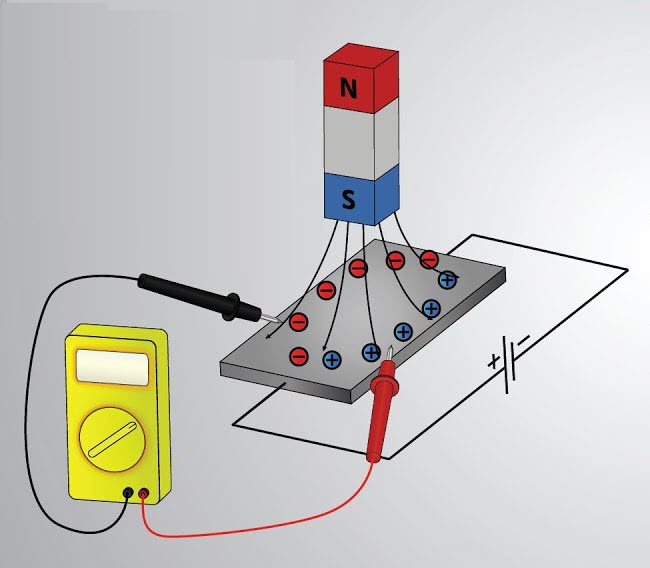
磁场感应产生洛伦兹力,导体上流动的电荷会因此发生路径偏移。
根据弗莱明的左手定则可以判断电荷流动的偏移方向,并且正负电荷的偏移方向是相反的。那么,如上图所示,正负电荷分别沿着左右两条不同的路径从中导体中穿过。
此时,在导体的两侧,也就是在其垂直于电流流过的方向上,就会有电势差产生。这就是霍尔效应(Hall Effect)。
从霍尔效应中我们可以得知,磁场的变化会影响电流的大小,因此若能从电流的变化中反推磁场的变化,进而反推出磁体位置的变化,就可以利用这一特性检测安装有磁体的转轴的位置或转速了。生活实例
一些智能舵机上会使用磁编码做为角度检测的手段

Apple Watch 的冠帽可以连续旋转实现调节音量的功能,但不会因为量程过小而感到局促

参数
尺寸:24×36mm
- 角度精度:±1°
- 工作电流:22mA
交互类—滑动电位器
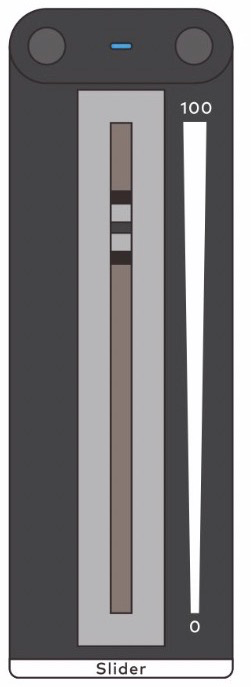
原理介绍
滑动电位器可以通过滑块的位置改变其电阻,电阻的变化会导致对应电路的电压也发生变化。透过电压与电阻的对应关系,我们就能推测电阻的大小,从而判断滑块所在的位置了。
生活实例


交互类—摇杆
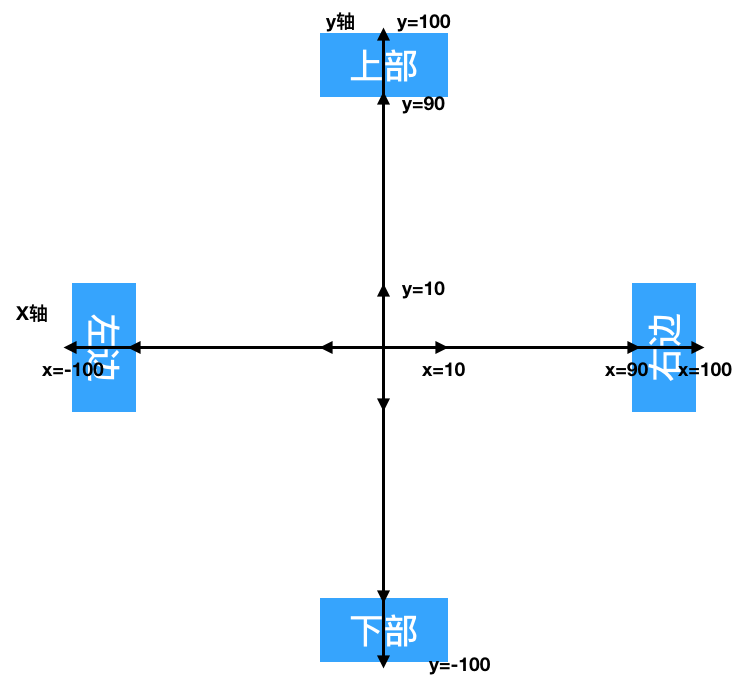
摇杆可以用来控制物体运动的方向,mBuild 的摇杆可以输出摇杆在X轴和Y轴上的坐标,范围及其上下左右的判定区域如下: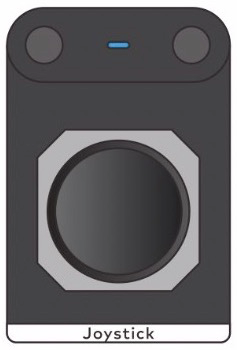
生活实例
- 游戏手柄利用摇杆控制人物的移动方向或视野方向

-
参数
尺寸:24×36mm
- 使用寿命:500,000次
- x轴读值范围:-100~100
- y轴读值范围:-100~100
- 工作电流:15mA
- 摇杆复归精度:±0.2mm

交互类—多路触摸
多路触摸上包含多个触摸传感器,可以检测对应触点被触摸的状态.
当检测到对应触点被触摸时,触点对应的指示灯会亮起。同时你可以通过鳄鱼夹或导线,将触摸传感器上的触点引出,比如通过导线将触点与水果相连,这将大大扩宽该模块的应用场景。
该模块能够智能地调节阈值,每一次断电重启后,该模块都会重置阈值,确保触点连接各种导电材质后,依旧能够灵敏的检测触摸事件。你还可以使用软件中的编程积木进一步调节触摸传感器的灵敏度。比如,当把触摸灵敏度调节为高时,你可以实现类似隔空触摸的效果。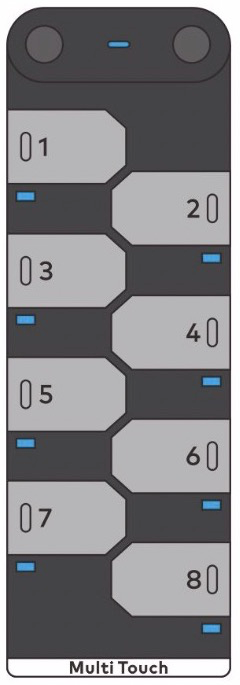
原理介绍
多路触摸使用了电容检测的原理,多路触摸的触点与地有一个初始电容Cp。而当人体或其他导体接近或接触多路触摸触点时,其会形成另一个电容,此时触点与“地”之间的等效电容相比初始电容就会对应变化,使得MCU得以检测到触点被触摸。因为触摸的判断依赖于对电容变化的检测,因此,触摸传感器在未被触摸时也有可能被触发。
生活实例


传感器类—光线传感器
原理介绍
mBuild 的光线传感器使用了光敏电阻作为核心元器件,这是一种能够随光线强度改变电阻值大小的元器件,电阻值的改变能够被MCU所检测,MCU因此能够判断环境中的光线强弱。
生活实例


原理介绍
mBuild 的光线传感器使用了光敏电阻作为核心元器件,这是一种能够随光线强度改变电阻值大小的元器件,电阻值的改变能够被MCU所检测,MCU因此能够判断环境中的光线强弱。
生活实例


传感器类—双路颜色传感器
双路颜色传感器使用两对光敏元件感知表面的颜色,在感知物体颜色的同时,还可以协助机器人进行巡线。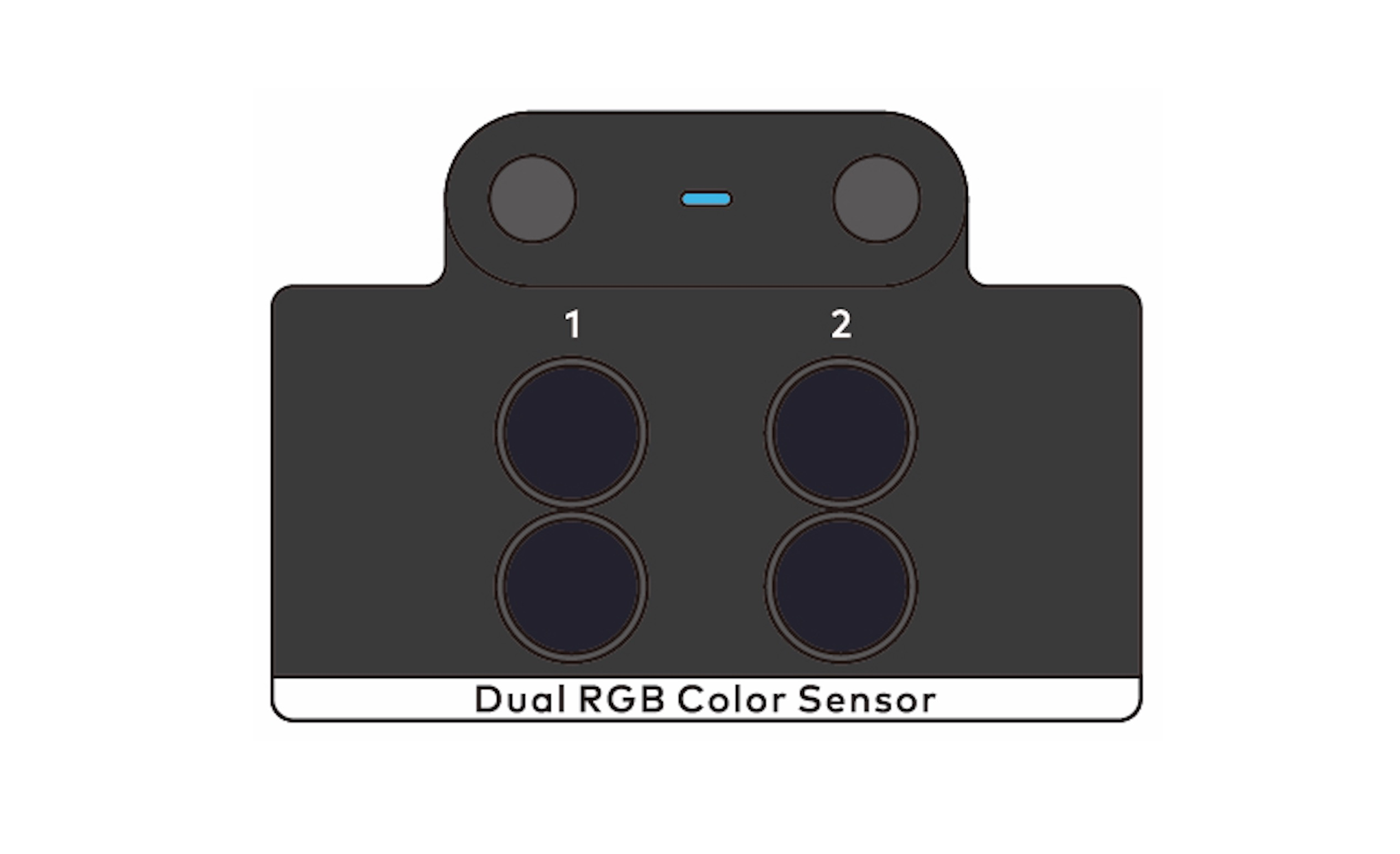

该模块提供从表示光强的模拟量、线和背景判断的数字量及运算之后的电机控制参数的多层次数据输出,保证使用的简便的同时,又提供了足够的灵活性。方便教师从不同层次讲解巡线和颜色的相关知识、原理。
该模块提供自适应地图学习功能。通过学习不同的背景和线的颜色,自动设置判断阈值。模块固件内置了巡线算法, 能够输出可以直接用来调整电机转速的参数,降低了实现高速巡线功能的难度。
按键功能说明:
- 单击:暂无功能定义;
- 双击:触发巡线学习,学习步骤为将传感器两探头都置于巡线地图背景上,双击按键,观察到两个巡线状态LED灯快速闪烁时在背景和线上水平定高晃动传感器直到LED灯停止快闪(时间约2.5S)。学习参数会自动存储,若学习失败则两个巡线状态灯会转为慢闪,需要重新学习。
- 长按:切换巡线补光灯颜色,长按按键2~3S,巡线补光灯按照红绿蓝的循环顺序切换巡线补光灯灯颜色(正常巡线补光灯颜色不需要切换,学习成功后自动设定)
原理介绍
每一对颜色传感器可以看做是由一个光线传感器+RGB灯组成的。
在现实世界中,当我们看到一个东西是红色时,往往意味着该物体对红光的吸收较弱,而对其他光的吸收较强,因此当我们让补光灯以红灯照射一个物体时,越红的物体对红色光的发射越强烈,光线传感器的读值也就越高,我们由此得到了被检测物体的“红色程度”,以此类推,我们可以切换补光灯的颜色,让其在红、绿、蓝之间不断变化,记录光线传感器在对应时刻的读值,从而推算出被检测物体的“红色程度”,“绿色程度”和“蓝色程度”,进而推测被检测物体的颜色。环境干扰和检测误差
在物体世界中,环境干扰和检测误差几乎是无处不在。如颜色传感器需要依赖检测补光灯在被检测物体上的反射光强度来“猜测”被检测物体的颜色,但此时环境光也会同时被光线传感器检测到,这会带来一定的误差。
检测误差也是一个需要被考虑的项,同一个物体即使在完全一致的环境中,两个 双路颜色传感器 对被检测物体的颜色也可能有不一样的看法(一般来说,它们的分歧不会很大)。
在实际操作中,工程师们会借助算法或是其他方面的设计来规避环境干扰和检测误差。比如,我们可以通过3D打印件来包裹住被检测物体和双路颜色传感器,来避免环境光的干扰,或是利用算法——在补光关闭时记录一个环境光强度,再开启补光灯,将两个时刻的光线传感器读值差认作是被检测物体反射补光灯灯光的强度,只要两个时刻足够接近,我们将可以认为环境光在两个时刻几乎是不变的。
对于检测误差,我们也可以使用算法,将多个相近的读值“归类”为一种颜色。生活实例

传感器类—声音传感器
生活实例
传感器类—热运动传感器

原理介绍
热运动传感器使用了人体热释电红外传感器作为核心元器件。人体正常温度为37℃,对应10μm波长的红外光,热运动传感器正是通过检测环境中10μm波长红外光的变化,进而判断环境中是否有人体或附近温度热源的运动的。
为了尽可能敏锐地感知环境中的10μm红外光变化,热运动传感器使用了菲涅尔滤光片对红外光做了汇聚,使得传感器能够尽可能多地接受环境中的红外光。
生活实例

传感器类—超声波传感器
超声波传感器能够检测它与被测物体之间的距离。超声波模块的左边探头负责发射超声波,而右边探头则负责接收超声波。
原理介绍
人耳朵能听到的声波频率为20~20000Hz,高于20000Hz的声波被称为超声波,声波在遇到障碍物时会被反弹并被超声波传感器的探头接收到,利用发送时间到接收时间的时间差,我们得以计算超声波探头到障碍物之间的距离。
生活实例
传感器类—测距传感器
生活实例

传感器类—运动传感器
运动传感器包含一个 3轴陀螺仪 以及一个 3轴加速度计 ,具备能够检测物体的运动姿态,加速度,以及震动强度。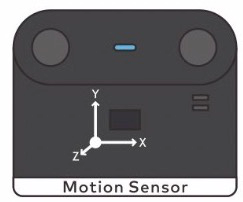
坐标轴及角度方向定义
| 坐标轴 | 角度英文名 | 角度中文名 | 角度范围 |
|---|---|---|---|
| X | Pitch | 俯仰角 | -180~180° |
| Y | Roll | 翻滚角 | -90~90° |
| Z | Yaw | 偏航角 | -180~180° |
原理介绍
如果你在互联网上直接搜索陀螺仪,你将很可能得到如下图片:
这是一种基于角动量守恒的理论,用来感测与维持方向的机械装置。陀螺仪主要是由一个位于轴心且可旋转的转子构成。由于转子的角动量,陀螺仪一旦开始旋转,即有抗拒方向改变的趋向。这类陀螺仪被应用于早期的导航系统中。
现代电子产品中,考虑到体积的限制,并得益于微机电技术的蓬勃发展,主要使用是基于MEMS(Micro Electro Mechanical systems)陀螺仪。它的体积极小,可以直接被焊接在PCB板上,这也是我们得以将运动传感器大小控制在24×20mm的主要原因。
两者在使用的原理上会有较大的不同,但你只需要知道,他们都能较为真实地反映物体在空间中的姿态及运动状态即可。
生活实例

传感器类—土壤湿度传感器
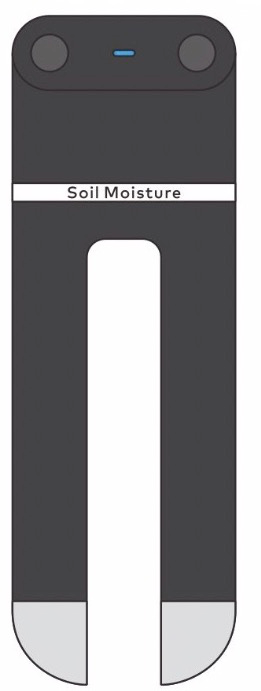
原理介绍
常见的土壤湿度传感器分为电容式和电阻式两种。电容式通过测量土壤湿度引起的电容的变化推测土壤的湿度,电阻式则是根据测量两个触点间的电阻大小来推测土壤湿度的大小。土壤湿度的严格定义上是土壤中水分所占质量的百分比,因此无论是电阻式或是电容式都无法准确地预估土壤中的含水量,而只能尽可能地做到读值与土壤中的含水量正相关。
mBuild 的土壤湿度传感器是电阻式的,当土壤湿度提高时,水分能够溶解部分土壤中包含的离子,从而使得土壤的电阻变小,也因此土壤湿度传感器的读值将变大。而当土壤中的含水量进一步提高时(极限的情况下,想象往水里扔一些泥土),土壤中的离子浓度反而会被过量的水稀释,导致导电能力下降,电阻值变高。因此你会发现,该土壤湿度传感器在纯水中的读值将小于在湿润土壤中的读值(尽管前者的含水量明显更高),这是因为湿润土壤中的离子浓度更高,电阻更小。
备注:也许你已经注意到了,由于是土壤湿度传感器使用了电阻式的方案,某种程度上它还能够被用来不十分精确地测量电阻的大小,我们会考虑在之后开发相关接口。
参数
- 尺寸:24×72mm
- 读值范围:0~100
- 一致性误差:±5%
- 工作电流:14mA
传感器类—温度传感器
温度传感器能够直接和被检测物体接触,检测其温度。
使用前,请先将温度传感器探头与模块如上图组装。
生活实例

传感器类—温湿度传感器
温湿度传感器可以检测的空气的湿度和温度,适合用于环境检测。可以利用其制作诸如智能风扇,智能加湿器之类的案例作品。
生活实例

传感器类—气体传感器
MQ2气体传感器可以很灵敏的检测到空气中的烟雾、液化气、丁烷、丙烷、甲烷、酒精、氢气等气体。
原理介绍
MQ-2型烟雾传感器属于二氧化锡半导体气敏材料,属于表面离子式N型半 导体。当处于200、300℃温度时,二氧化锡吸附空气中的氧,形成氧的负离子吸附,使半导体中的电子密度减少,从而使其电阻值增加。当与烟雾接触时,如果晶粒间界处的势垒受到该烟雾的调制而变化,就会引起表而电导率的变化。利用这一点就可以获得这种烟雾存在的信息,烟雾浓度越大,电导率越大输出电阻越低。
生活实例

温度传感器—火焰传感器
火焰传感器通过检测红外光来检测火焰及其大小。
由于是利用检测红外光进行判断,因此该模块在阳光直射下使用时,会出现严重干扰,无法正常工作,这是因为太阳光的强度很大,其中也包含大量红外波段的光线,这会被元器件误判为火焰。
生活实例

传感器类—磁敏传感器
生活实例

参数
- 尺寸:24×20mm
- 检测距离:<1cm
- 工作电流:15mA
传感器—视觉模块
视觉模块能够识别条码和线条,也可以学习和识别颜色鲜艳的物体,实现诸如垃圾分类、智慧交通、物体追踪、智能巡线等功能。
连接主控板
通过不同的连线方式,可以将视觉模块作为一个 RJ25 电子模块或 mBuild 电子模块,连接到 mBot 或光环板,然后使用 mBot 或光环板控制视觉模块。
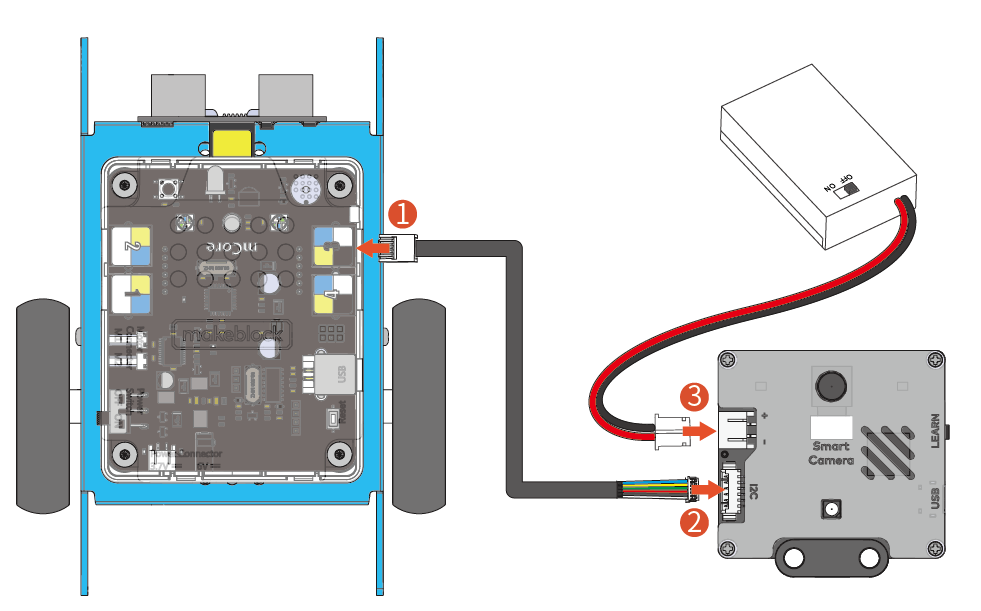
连接到 mBot
与 mBot 连接时,可以使用 3.7V 锂电池或 mBuild 电源模块连接到视觉模块,为其供电。
方式一 使用 mBuild 电源模块供电(推荐)
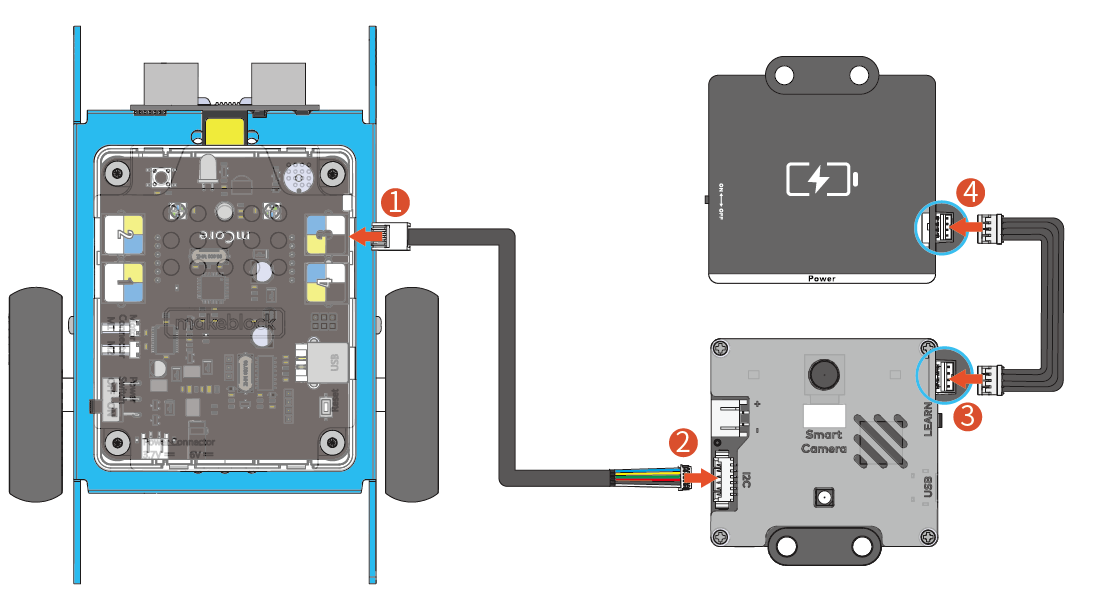
方式二 使用 3.7V 锂电池供电
连接到光环板
注意:仅通过 USB 供电可能会影响模块的正常使用,建议使用 mBuild 电源模块供电。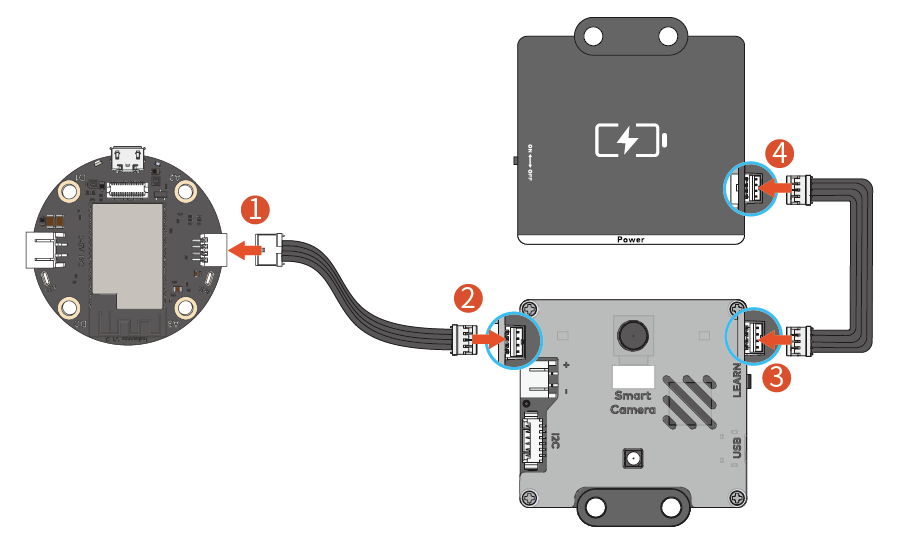
功能介绍
色块学习
视觉模块能够学习颜色鲜艳的物体,并在学习后识别色块,返回它们的坐标及长宽信息。
学习步骤如下:
- 长按学习按钮,直到识别指示灯亮红色(橙、黄、绿、青、蓝、紫灯亦可,不同颜色代表学习不同物体)时松开。
- 将要学习的色块放到摄像头正前方。
- 观察视觉模块正面或背面的识别指示灯,同时缓慢移动需要学习的物体直至指示灯的颜色与被学习物体的颜色一致。
- 短按学习按钮记录当前学习的物体。
- 学习成功,当摄像头识别到已学习的物体时,彩色指示灯颜色会与被识别到物体的颜色一致。
这样的方式最多支持学习并记录 7 种物体。
学习完成后,可以使用如下示例代码完成简单的色块(色块1)追踪功能。
注意事项
1、学习的物体需要具备鲜艳的颜色,颜色越鲜艳,识别的准确率越高。
错误示范:学习熊猫人偶
2、视觉模块支持学习并记录 7 种物体,这 7 种物体的特征点差别应尽可能大。
错误示范:学习黄球和小黄帽
正确示范:学习橙球和绿球
3、在程序中,视觉模块需要被切换到“色块识别模式”,才能够正常获得识别到色块的坐标及长宽信息。
4、视觉模块对光线变化具备一定抗干扰能力,但多变的光线仍然会影响识别率。在新的光线环境下,旧的学习结果将无法适用。以下方法有助于解决这一问题:
- 重置白平衡
- 开启补光灯后再学习和识别
- 在 PixyMon 软件中设置细节参数
-
识别条码和巡线
视觉模块支持同时识别条码、线条和岔路,且无需学习。
但视觉模块需要先进入“线/条码识别模式”才能够识别并返回条码、线、岔路的坐标信息。
条码识别
视觉模块包装内包含了条码卡片和贴纸,点击可下载条码文件。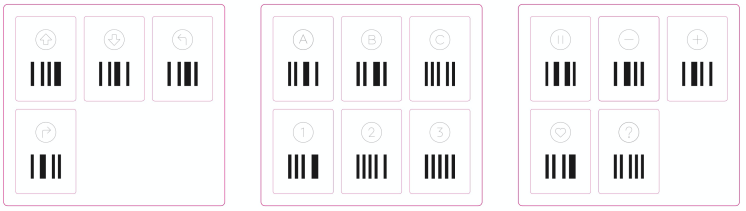
您可以将卡片放在巡线地图上: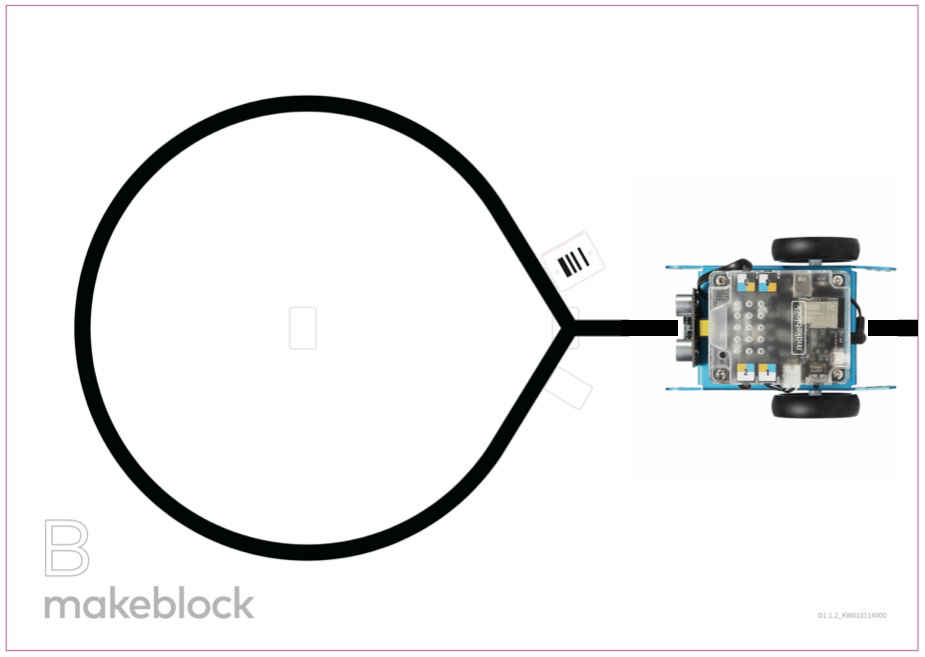
识别线和岔路
视觉模块能够识别线条并判断岔路数量,返回必要的信息(坐标、方向、岔路数量)。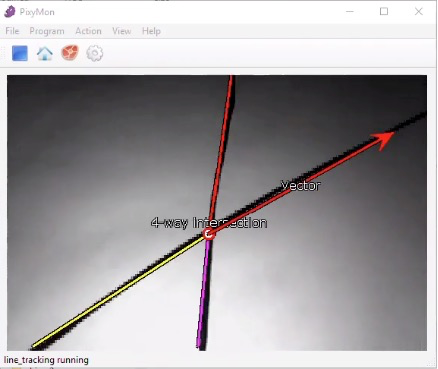
注意事项
1、您可以在程序中设置“浅底深线”或是“深底浅线”。
2、视觉模块默认过滤掉了宽度较低的线条,若您需要视觉模块识别细线,请查看 PixyMon 的使用指南。PixyMon
视觉模块支持 PixyMon 软件,通过 PixyMon 软件可以查看摄像头画面、调试视觉模块功能以及对一些参数做微调,探索更多更复杂的功能。
PixyMon 下载
PixyMon 使用指南
注意事项
考虑到模块的易用性,我们并未在积木块上开发很多功能,如您希望通过积木块控制视觉模块完成更多功能,请使用扩展编辑器。
扩展编辑器帮助文档参数
尺寸:48*48mm
- 分辨率:640 * 480
- 视场角:65.0度
- 有效焦距:4.65±5% mm
- 识别速度:60帧/s
- 识别距离:0.25-1.2m范围最佳
- 抗跌落能力:1m
- 供电方式:3.7V锂电池 或 5V mBuild 电源模块
- 功耗范围:0.9-1.3W
- 工作温度:-10℃~55℃
显示类—8×16 LED 点阵
LED点阵可以单独设置点阵上每一个点的亮灭,从而实现对动画、表情、文字、数字的表现。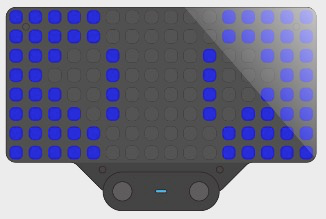
生活实例
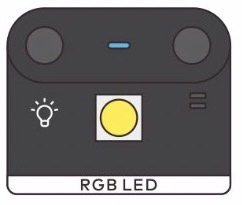
灯效类—RGB灯
生活实例

灯效类—彩灯驱动
彩灯驱动能够驱动灯珠、灯带、灯环等多种灯类配件。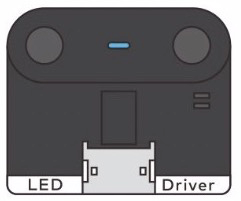
灯带

灯带可以被用来制作光剑、灯效文字或是用做氛围渲染。

灯带的 IN 口需要和灯带驱动上的接口或上一级灯珠、灯带、灯环的 OUT 口连接。灯带不防水,在水中使用可能造成模块损坏并将失去售后保修。
参数
- 尺寸:8×112mm
12灯灯环
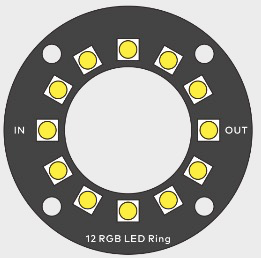
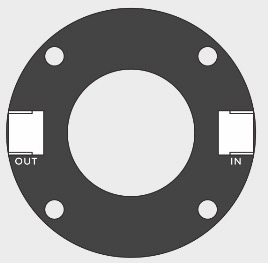
灯环的 IN 口需要和灯带驱动上的接口或上一级灯珠、灯带、灯环的 OUT 口连接。灯环不防水,在水中使用可能造成模块损坏并将失去售后保修。灯环上的第1颗到第12颗灯的位置与钟表一致,如下图: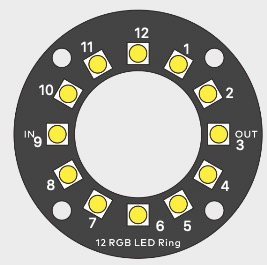
参数
- 尺寸:45mm直径
播放类—扬声器
该扬声器模块可以播放各类预置的音效,并以极为方便的方式支持用户存储自定义的音频文件到模块中,并通过积木块调用并播放。
存储自定义音频文件
通过以下步骤,存储自定义音频文件到该模块
1. 连接模块至电脑
使用 Micro-USB 数据线连接扬声器模块(Mirco-USB 接口)至电脑(USB 接口)。连接成功后,电脑将显示模块磁盘,打开磁盘即可查看模块包含的文件。
2. 存储自定义音频
将您想要播放的音频文件拖到模块磁盘即可。
注意:模块存储空间有限,若音频文件过大,将无法存储,建议您压缩文件大小,再重新尝试。
3. 修改自定义音频文件名【重要】
由于硬件限制,本模块只能通过音频文件名的前四位字符(且要求为英文字母、数字或标点)寻找并播放音频。因此为了成功播放音频,您需要修改音频文件名称为特定格式(英文字母、数字或标点组成的四位字符)。
下面是一些例子,希望能够帮助您更好地了解如何修改文件名。左侧为原文件名,右侧为修改后可用的文件名称。
- 龙的传人.mp3 —————————> ldcr.mp3
- 改革春风吹满地.mp3 ————-> ggcf.mp3
- happy birthday.mp3 —————> M001.mp3
文件名修改完成后,就可以通过慧编程中的积木块来播放自定义音频了。
播放自定义音频
慧编程有两个积木块被设计用来播放自定义音频文件:

例如:
即执行第一个扬声器播放文件名为 “ldcr” 的自定义音频。
恢复扬声器的默认音频
错误的操作可能会损害扬声器模块原本的预置音效库,导致预置音效无法正常播放。此处为扬声器模块默认音效的最新压缩包,下载并解压到扬声器的磁盘空间,替换掉原有的音频文件即可恢复扬声器模块的默认音效。
扬声器预置文件
参数
- 尺寸:24×36mm
- 总存储空间:16M
- 支持音频格式:mp3
- 连接器类型:micro-USB
- 额定工作电流:400mA
运动类—电机驱动

生活实例

运动类—舵机驱动
舵机驱动能够驱动各类180°舵机转动到指定的角度,其引脚从左到右依次为数字输出、VCC、GND。
参数
- 尺寸:24×24mm
- 工作电流:小于1A
外设类—红外遥控器
该配件可以和mbuild 红外收发模块配合使用,软件内提供了对应积木块来检测红外遥控器遥控器上的按键是否被按下。
注意:该配件使用纽扣电池供电,出厂一般会自带电池,使用前需要取下绝缘片
参数
- 尺寸:90×40×12mm
- 频段:940nm
- 支持协议:NEC
- 发射范围:8m
- 供电方式:CR2025纽扣电池
- 按键寿命:>20万次
外设类—蓝牙传感器
蓝牙遥控器可以和 Makeblock 各类机器人,主控板,蓝牙模组,蓝牙适配器进行配对,从而实现对机器人、舞台、主控板、项目作品的远程遥控。
该遥控器主要被用于 MakeX 赛事中手动环节的机器人控制上。
参数
- 材质:ABS
- 蓝牙版本:4.0
- 传输距离:20m
- 抗干扰能力:支持80个同时工作
- 供电方式:2节 5号电池
配件类—延长模块
连接示意

配件类—快速转接件
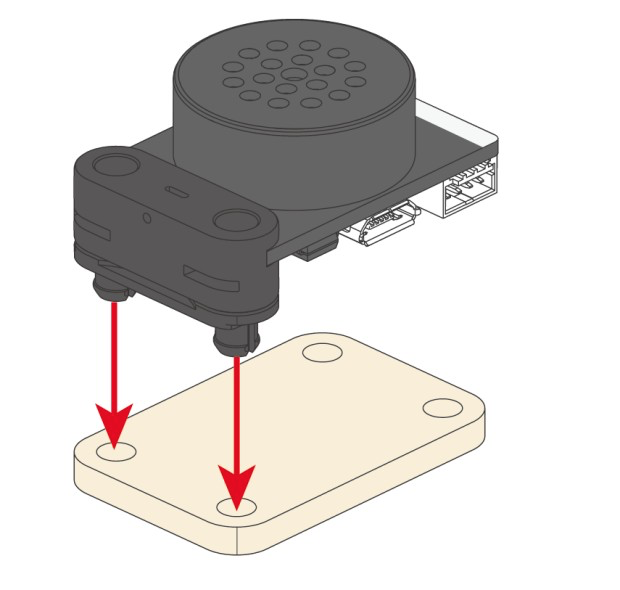
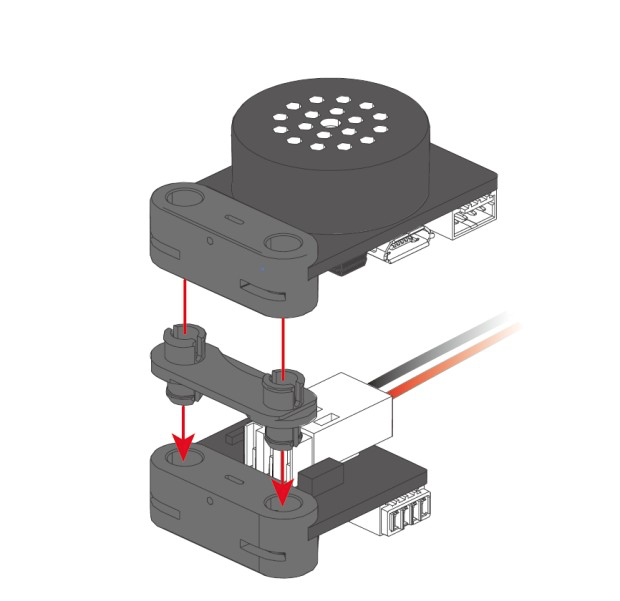
快速转接件可以用于将 mBuild 模块快速固定到 M4 孔位上,或是利用快速转接件实现 mBuild 模块的堆叠。
快速固定示意
堆叠示意
配件类—5V通用连接线
Makeblock 提供10cm、20cm、60cm 三种规格的5V通用连接线,该连接线可以用于 mbuild 与 mbuild 模块,mbuild 与光环板之间的连接。
如需要其他长度的连接线,你可以将现有连接线通过与延长模块组合。

若有收获,就点个赞吧
0 人点赞
