1、电机: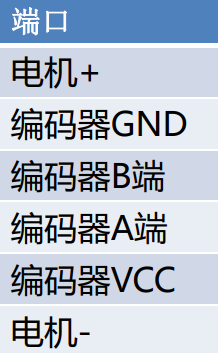
减速比1:20,即黑色转子转20圈,电机头转一圈。
电机+接7.4V电压,电机-接GND,电机即可转起来。提高转速提高电压,反转反接电压。
2、PWM:
用占空比控制电机转速
//方法1analogWrite(3,100);//3号引脚输出频率500Hz,占空比为(100/256)的PWM波,其中100可以是0~255的数
3、电机驱动模块:
一般电机驱动电压12~15V,电流超过1A,UNO不能直接带动电机工作,故使用电机驱动模块。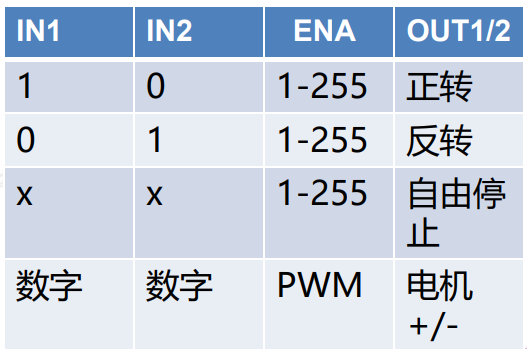
4、开环->闭环,形成负反馈稳定转速
- 测出转速,形成反馈:
记录两组脉冲信号,测转速及转动方向:
如在A的上升沿计数:若B此时是高电平,则是正转;若B此时是低电平,则是反转。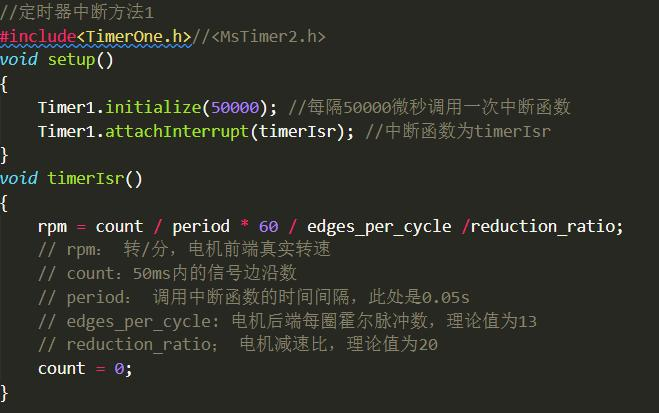
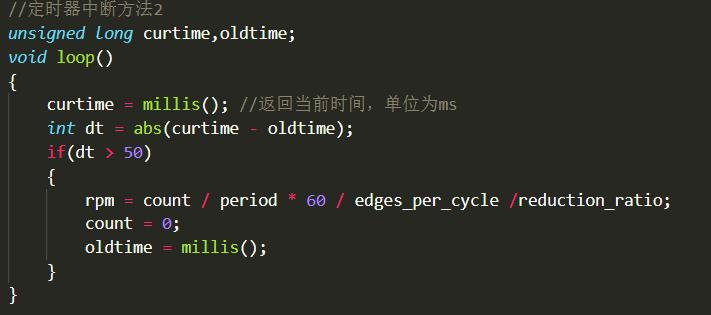
注意rpm计算公式中period的单位为秒。
单倍频测速:(测电压下降点)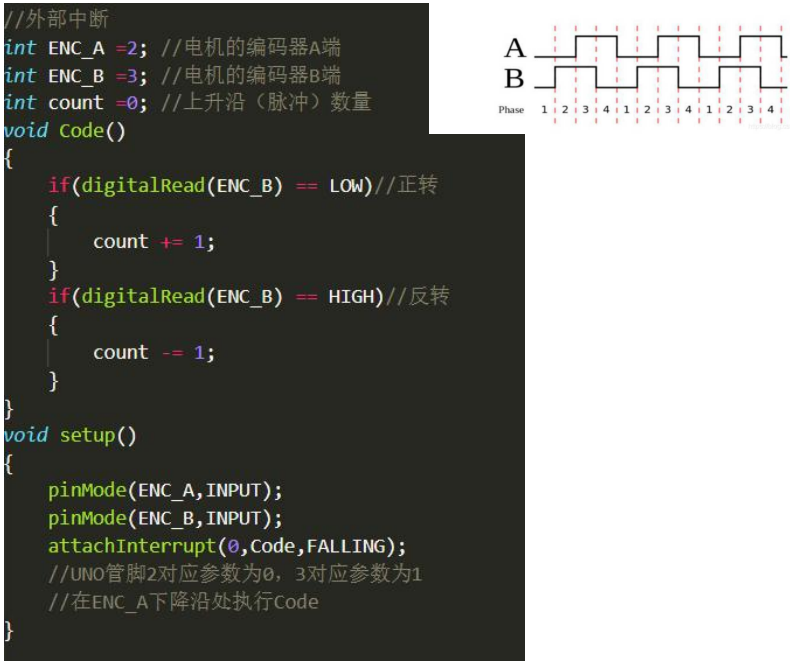
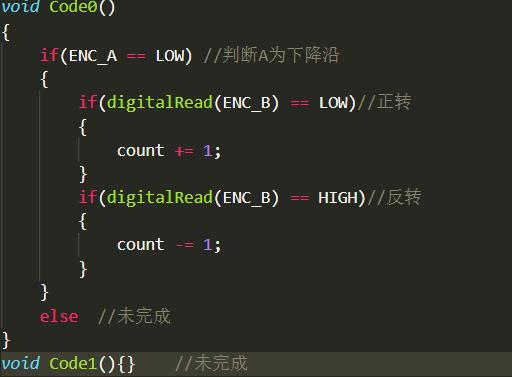
四倍频测速:(同时测A.B两个信号的上升和下降点)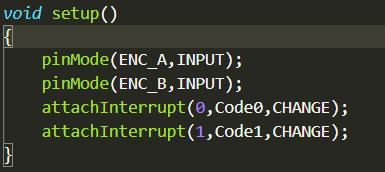
- 根据反馈情况进行控制:
PID算法: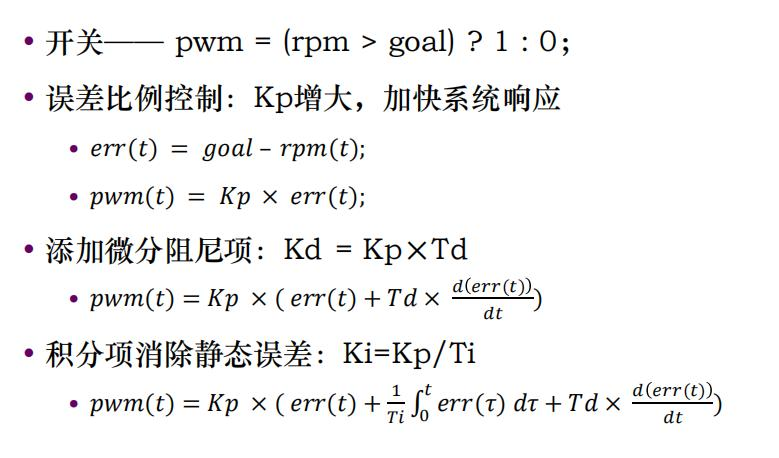
位移式: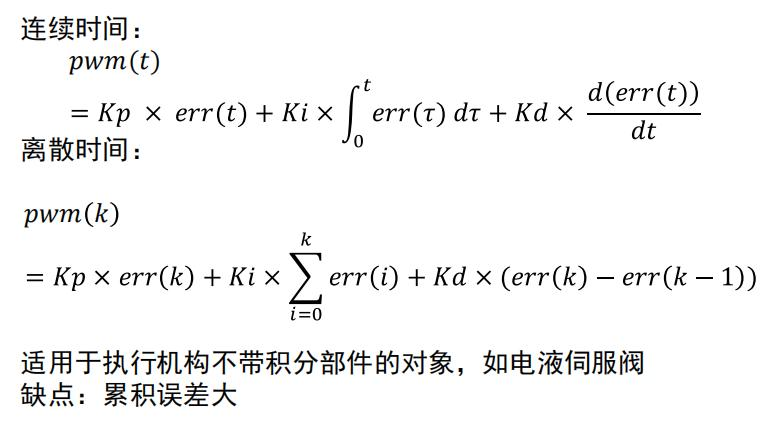
增量式: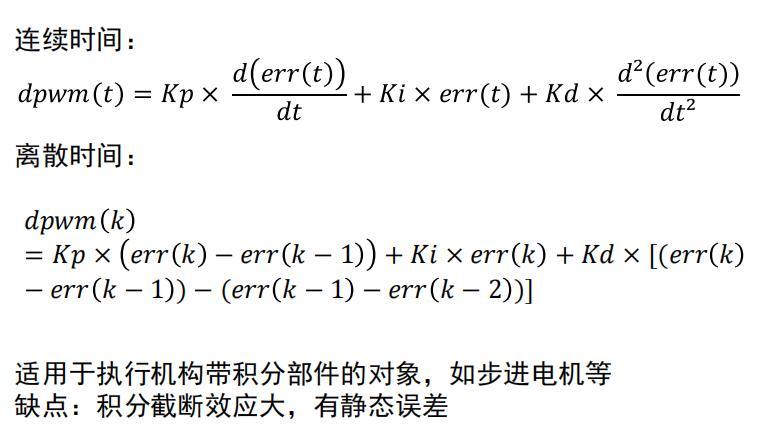
调参口诀:
先是比例后积分, 最后再把微分加,
曲线振荡很频繁, 比例度盘要放大,
曲线漂浮绕大弯, 比例度盘往小扳,
曲线偏离回复慢, 积分时间往下降,
曲线波动周期长, 积分时间再加长,
作业要求:
参考示例1~4,用位移式PID算法+四倍频计数控制一个小电机以自定的rpm运转(例如100,具体数值写在报告中)
•撰写实验报告(不要求字数),要求报告中包含所有代码,可以选择写调参过程,心得体会等等
•实验报告中要求附有串口绘图器的截图,显示最终调好的电机启动时的波形+受到外界阻尼时的波形(如下图所示)
•同时提交该电机在指定转速下转动的视频,要求从视频中能大致看出电机的实际转速

若有收获,就点个赞吧
0 人点赞
