[toc]
文章已收录我的仓库:Java学习笔记与免费书籍分享
线程间同步方式
引言
不同线程间对临界区资源的访问可能会引起常见的并发问题,我们希望线程原子式的执行一系列指令,但由于单处理器上的中断,我们必须想一些其他办法以同步各线程,本文就来介绍一些线程间的同步方式。
互斥锁
互斥锁(又名互斥量),强调的是资源的访问互斥:互斥锁是用在多线程多任务互斥的,当一个线程占用了某一个资源,那么别的线程就无法访问,直到这个线程unlock,其他的线程才开始可以利用这个资源。
int pthread_mutex_lock(pthread_mutex_t *mutex);int pthread_mutex_trylock(pthread_mutex_t *mutex);int pthread_mutex_unlock(pthread_mutex_t *mutex);
注意理解trylock函数,这与普通的lock不一样,普通的lock函数在资源被锁住时会被堵塞,直到锁被释放。
trylock函数是非阻塞调用模式,也就是说如果互斥量没被锁住,trylock函数将把互斥量加锁,并获得对共享资源的访问权限; 如果互斥量被锁住了,trylock函数将不会阻塞等待而直接返回EBUSY,表示共享资源处于忙状态,这样就可以避免死锁或饿死等一些极端情况发生。
探究底层,实现一个锁
实现一个锁必须需要硬件的支持,因为我们必须要保证锁也是并发安全的,这就需要硬件支持以保证锁内部是原子实现的。
很容易想到维护一个全局变量flag,当该变量为0时,允许线程加锁,并设置flag为1;否则,线程必须挂起等待,直到flag为0.
typedef struct lock_t {int flag;}lock_t;void init(lock_t &mutex) {mutex->flag = 0;}void lock(lock_t &mutex) {while (mutex->flag == 1) {;} //自旋等待变量为0才可进入mutex->flag = 1;}void unlock(lock_t &mutex) {mutex->flag = 0;}
这是基于软件的初步实现,初始化变量为0,线程自旋等待变量为0才可进入,这看上去似乎并没有什么毛病,但是仔细思考,这是有问题的:
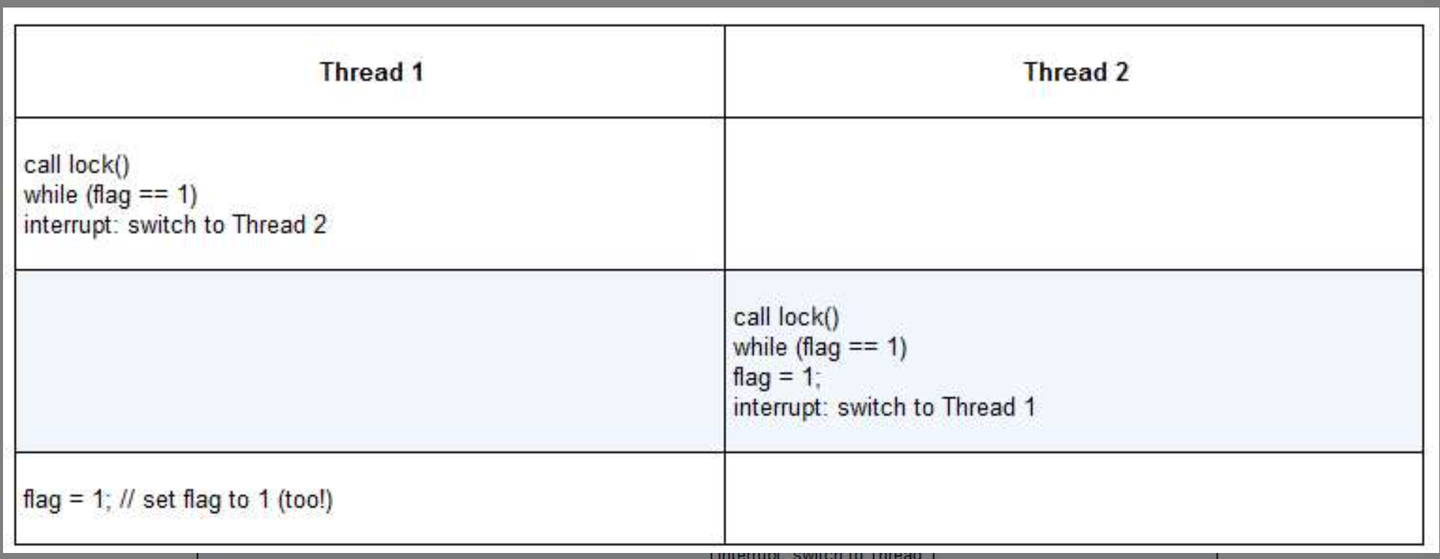
当线程恰好通过while判定时陷入中断,此时并未设置flag为1,另一个线程闯入,此时flag仍然为0,通过while判定进入临界区,此时中断,回到原线程,原线程继续执行,也进入临界区,这就造成了同步问题。
在while循环中,仅仅设置mutex->flag == 1是不够的,尽管他是一个原语,我们必须有更多的代码,同时,当我们引入更多代码时,我们必须保证这些代码也是原子的,这就意味着我们需要硬件的支持。
我们思考上面代码为什么会失败?原因是当退出while循环时,在这一时刻flag仍然为0,这就给了其他线程抢入临界区的机会。
解决办法也很直观 —— 在退出while时,借助硬件支持保证flag被设置为1。
测试并加锁(TAS)
我们编写如下函数:
int TestAndSet(int *old_ptr, int new) {int old = *old_ptr;*old_ptr = new;return old;}
同时重新设置while循环:
void lock(lock_t &mutex) {while (TestAndSet(mutex->flag, 1) == 1) {;} //自旋等待变量为0才可进入mutex->flag = 1;}
这里,我们借助硬件,保证TestAndSet函数是原子执行的,现在锁可以正确的使用了。当flag为0时,我们通过while测试时已经将flag设置为1了,其他线程已经无法进入临界区;如果flag = 1,我们还是将其设置为1(局限性),并没有改变其值。
TAS的局限性在于它几乎只能用于二值锁的实现,诸如信号量的实现便无能为力了,但优点在于简单高效。
比较并交换(CAS)
我们编写如下函数:
int CompareAndSwap(int *ptr, int expected, int new) {int actual = *ptr;if (actual == expected) {*ptr = new;}return actual;}
同样的,硬件也应该支持CAS原语以保证CAS内部也是安全的,现在重新设置while:
void lock(lock_t &mutex) {while (CompareAndSwap(mutex->flag, 0, 1) == 1) {;} //自旋等待变量为0才可进入mutex->flag = 1;}
现在锁可以正确的使用了,当flag为0时,我们通过while测试时已经将flag设置为1了,其他线程已经无法进入临界区。
此外你可能发现CAS所需要更多的寄存器,在将来研究synchronozation时,你会发现它的妙处。
另一个问题,过多的自旋?
你可能发现了,尽管一个线程未能获得锁,其仍然在不断while循环以占用CPU资源,一个办法就是当线程未能获得锁,进入休眠以释放CPU资源(条件变量),当一个线程释放锁时,唤醒一个正在休眠的线程。不过这样也有缺点,进入休眠与唤醒一个锁也是需要时间的,当一个线程很快就能释放锁时,多等等是比陷入休眠更好的选择。
Linux下采用两阶段锁,第一阶段线程自旋一定时间或次数等待锁的释放,当达到一定时间或一定次数时,进入第二阶段,此时线程进入休眠。
回到互斥锁
互斥锁提供了并发安全的基本保证,互斥锁用于保证对临界区资源的安全访问,但何时需要访问资源并不是互斥锁应该考虑的事情,这可能是条件变量该考虑的事情。
如果线程频繁的加锁和解锁,效率是非常低效的,这也是我们必须要考虑到的一个点。
信号量
理解信号量
信号量并不用来传送资源,而是用来保护共享资源,理解这一点是很重要的,信号量 s 的表示的含义为同时允许访问资源的最大线程数量,它是一个全局变量。
信号量 s 是具有非负整数值的全局变量,由两种特殊的原子操作来实现,这两种原子操作称为 P 和 V :
P(s):如果 s 的值大于零,就给它减1,然后立即返回,进程继续执行。;如果它的值为零,就挂起该进程的执行,等待 s 重新变为非零值。
V(s):V操作将 s 的值加1,如果有任何进程在等在 s 值变为非0,那么V操作会重启这些等待进程中的其中一个(随机地),然后由该进程执行P操作将 s 重新置为0,而其他等待进程将会继续等待。
在进程中也可以使用信号量,对于信号量的理解进程中与线程中并无太大差异,都是用来保护资源,关于更多信号量的理解参见这篇文章: JavaLearningNotes/进程间通信方式。
有名信号量
有名信号量以文件的形式存在,即时是不同进程间的线程也可以访问该信号量,因此可以用于不同进程间的多线程间的互斥与同步。
创建打开有名信号量
sem_t *sem_open(const char *name, int oflag);sem_t *sem_open(const char *name, int oflag, mode_t mode, unsigned int value);//成功返回信号量指针;失败返回SEM_FAILED,设置errno
name是文件路径名,value设置为信号量的初始值。
关闭信号量,进程终止时,会调用它
int sem_close(sem_t *sem); //成功返回0;失败返回-1,设置errno
删除信号量,立即删除信号量名字,当其他进程都关闭它时,销毁它
int sem_unlink(const char *name);
等待信号量,测试信号量的值,如果其值小于或等于0,那么就等待(阻塞);一旦其值变为大于0就将它减1,并返回
int sem_wait(sem_t *sem);int sem_trywait(sem_t *sem);//成功返回0;失败返回-1,设置errno
当信号量的值为0时,sem_trywait立即返回,设置errno为EAGAIN。如果被某个信号中断,sem_wait会过早地返回,设置errno为EINTR
发出信号量,给它的值加1,然后唤醒正在等待该信号量的进程或线程
int sem_post(sem_t *sem);
成功返回0;失败返回-1,不会改变它的值,设置errno,该函数是异步信号安全的,可以在信号处理程序里调用它
无名信号量
无名信号量存在于进程内的虚拟空间中,对于其他进程是不可见的,因此无名信号量用于一个进程体内各线程间的互斥和同步,使用如下API:
(1)sem_init 功能:用于创建一个信号量,并初始化信号量的值。 函数原型:
int sem_init (sem_t* sem, int pshared, unsigned int value);
函数传入值: sem:信号量。pshared:决定信号量能否在几个进程间共享。由于目前LINUX还没有实现进程间共享信息量,所以这个值只能取0。
(2)其他函数
int sem_wait (sem_t* sem);int sem_trywait (sem_t* sem);int sem_post (sem_t* sem);int sem_getvalue (sem_t* sem);int sem_destroy (sem_t* sem);
功能:
sem_wait和sem_trywait相当于P操作,它们都能将信号量的值减一,两者的区别在于若信号量的值小于零时,sem_wait将会阻塞进程,而sem_trywait则会立即返回。
sem_post相当于V操作,它将信号量的值加一,同时发出唤醒的信号给等待的线程。
sem_getvalue 得到信号量的值。
sem_destroy 摧毁信号量。
如果某个基于内存的信号量是在不同进程间同步的,该信号灯必须存放在共享内存区中,这要只要该共享内存区存在,该信号灯就存在。
总结
无名信号量存在于内存中,有名信号量是存在于磁盘上的,因此无名信号量的速度更快,但只适用于一个独立进程内的各线程;有名信号量可以速度欠缺,但可以使不同进程间的线程同步,这是通过共享内存实现的,共享内存是进程间的一种通信方式。
你可能发现了,当信号量的值s为1时,信号量的作用于互斥锁的作用是一样的,互斥锁只能允许一个线程进入临界区,而信号量允许更多的线程进入临界区,这取决于信号量的值为多少。
条件变量
什么是条件变量?
在互斥锁中,线程等待flag为0才能进入临界区;信号量中P操作也要等待s不为0……在多线程中,一个线程等待某个条件是很常见的,互斥锁实现一节中,我们采用自旋来实现,但这效率非常低效,是否有一个更专门、更高效的方式实现条件的等待?
它就是条件变量!条件变量(condition variable)是利用线程间共享的全局变量进行同步的一种机制,主要包括两个动作:一个线程等待某个条件为真,而将自己挂起;另一个线程设置条件为真,并通知等待的线程继续。
由于某个条件是全局变量,因此条件变量常使用互斥锁以保护(这是必须的,是被强制要求的)。
条件变量与互斥量一起使用时,允许线程以无竞争的方式等待特定的条件发生。
线程可以使用条件变量来等待某个条件为真,注意理解并不是等待条件变量为真,条件变量(cond)是在多线程程序中用来实现”等待—>唤醒”逻辑常用的方法,用于维护一个条件(这与条件变量是不同的概念),线程用条件变量的用以等待条件成立,并不是说等待条件变量为真或为假,而是利用条件变量去等待某条件。条件变量是一个显式的队列,当条件不满足时,线程将自己加入等待队列,同时释放持有的互斥锁;当一个线程改变条件时,可以唤醒一个或多个等待线程(注意此时条件不一定为真)。
在条件变量上有两种基本操作:
- 等待(wait):一个线程处于等待队列中休眠,此时线程不会占用互斥量,当线程被唤醒后,重新获得互斥锁(可能是多个线程竞争),并重新获得互斥量。
- 通知(signal/notify):当条件更改时,另一个线程发送通知以唤醒等待队列中的线程。
相关函数
1. 初始化
条件变量采用的数据类型是pthread_cond_t,,在使用之前必须要进行初始化,,这包括两种方式:
静态: 直接设置条件变量cond为常量PTHREAD_COND_INITIALIZER。
动态: pthread_cond_init函数, 是释放动态条件变量的内存空间之前, 要用pthread_cond_destroy对其进行清理。
int pthread_cond_init(pthread_cond_t *restrict cond, pthread_condattr_t *restrict attr);int pthread_cond_destroy(pthread_cond_t *cond);//成功则返回0, 出错则返回错误编号.
注意:条件变量占用的空间并未被释放。
cond:要初始化的条件变量;attr:一般为NULL。
2. 等待条件
int pthread_cond_wait(pthread_cond_t *restrict cond, pthread_mutex_t *restric mutex);int pthread_cond_timedwait(pthread_cond_t *restrict cond, pthread_mutex_t *restrict mutex, const struct timespec *restrict timeout);//成功则返回0, 出错则返回错误编号.
这两个函数分别是阻塞等待和超时等待,堵塞等到进入等待队列休眠直到条件修改而被唤醒;超时等待在休眠一定时间后自动醒来。
进入等待时线程释放互斥锁,而在被唤醒时线程重新获得锁。
3. 通知条件
int pthread_cond_signal(pthread_cond_t *cond);int pthread_cond_broadcast(pthread_cond_t *cond);//成功则返回0, 出错则返回错误编号.
这两个函数用于通知线程条件已被修改,调用这两个函数向线程或条件发送信号。
用法与思考
条件变量用法模板:
pthread_cond_t cond; //条件变量mutex_t mutex; //互斥锁int flag; //条件//A线程void threadA() {Pthread_mutex_lock(&mutex); //保护临界资源,因为线程会修改全局条件flagwhile (flag == 1) //等待某条件成立Pthread_cond_wait(&cond, &mutex); //不成立则加入队列休眠,并释放锁....dosomthing // 条件成立....change flag //条件被修改Pthread_cond_signal(&cond); //发送信号通知条件被修改Pthread_mutex_unlock(&mutex); //发送信号后尽量快速释放锁,因为被唤醒的线程会尝试获得锁}//B线程void threadB() {Pthread_mutex_lock(&mutex); //保护临界资源while (flag == 0) //等待某条件成立Pthread_cond_wait(&cond, &mutex); //不成立则加入队列休眠,并释放锁....dosomthing // 条件成立....change flag //条件被修改Pthread_cond_signal(&cond); //放松信号后尽量快速释放锁,因为被唤醒的线程会尝试获得锁Pthread_mutex_unlock(&mutex);}
通过上面的一个例子,应该很好理解条件变量与条件的区别,条件变量是一个逻辑,它并不是while循环里的bool语句,我相信很多初学者都有这么一个误区,即条件变量就是线程需要等待的条件。条件是条件,线程等待条件而不是等待条件变量,条件变量使得线程更高效的等待条件成立,是一组等待 — 唤醒 的逻辑。
注意这里仍然要使用while循环等待条件,你可能会认为明明已经上锁了别的线程无法强入。事实上当线程A陷入休眠时会释放锁,而当其被唤醒时,会尝试获得锁,而正在其尝试获得锁时,另一个线程B现在尝试获得锁,并且抢到锁进入临界区,然后修改条件,使得线程A的条件不再成立,线程B返回,此时线程A终于获得锁了,并进入临界区,但此时线程A的条件根本已经不成立,他不该进入临界区!
此外,被唤醒也不代表条件成立了,线程陷入休眠时可能会因为超时而返回,这种情况下条件并不会成立;此外上述代码线程B修改flag = 3,并且唤醒线程A,这里线程A的条件根本不符合,所以必须重复判定条件(这是糟糕的情况)。互斥锁和条件变量的例子告诉我们:在等待条件时,总是使用while而不是if!
陷入休眠的线程必须释放锁也是有意义的,如果不释放锁,其他线程根本无法修改条件,休眠的线程永远都不会醒过来!
实践——读写者锁
读取锁——共享;写入锁——独占。即:读线程可以加多个,而写线程只能有一个,并且读者和写者不能同时工作。
这种情况下由于允许多个读者共享临界区效率会高效,我们来考虑实现的问题:只允许一个写者工作,那么一定需要一个互斥量或二值信号量来维护,我们称为写者锁;由于读者和写者不能同时工作,第一个读者必须尝试获取写者锁,而一旦读者数量大于1,则后续读者无须尝试获取写者锁而可直接进入,注意到这里存在全局读者数量变量,因此读者也需要一个锁以维护全局读者数量,最后一个退出的读者必须负责释放读者锁。
知晓原理,快去自己动手实现一个读写者锁把!
Linux下通过pthread_rwlock函数族实现。
其核心思想便是如此。

若有收获,就点个赞吧
0 人点赞
